
Uart + UpDownCounter Design
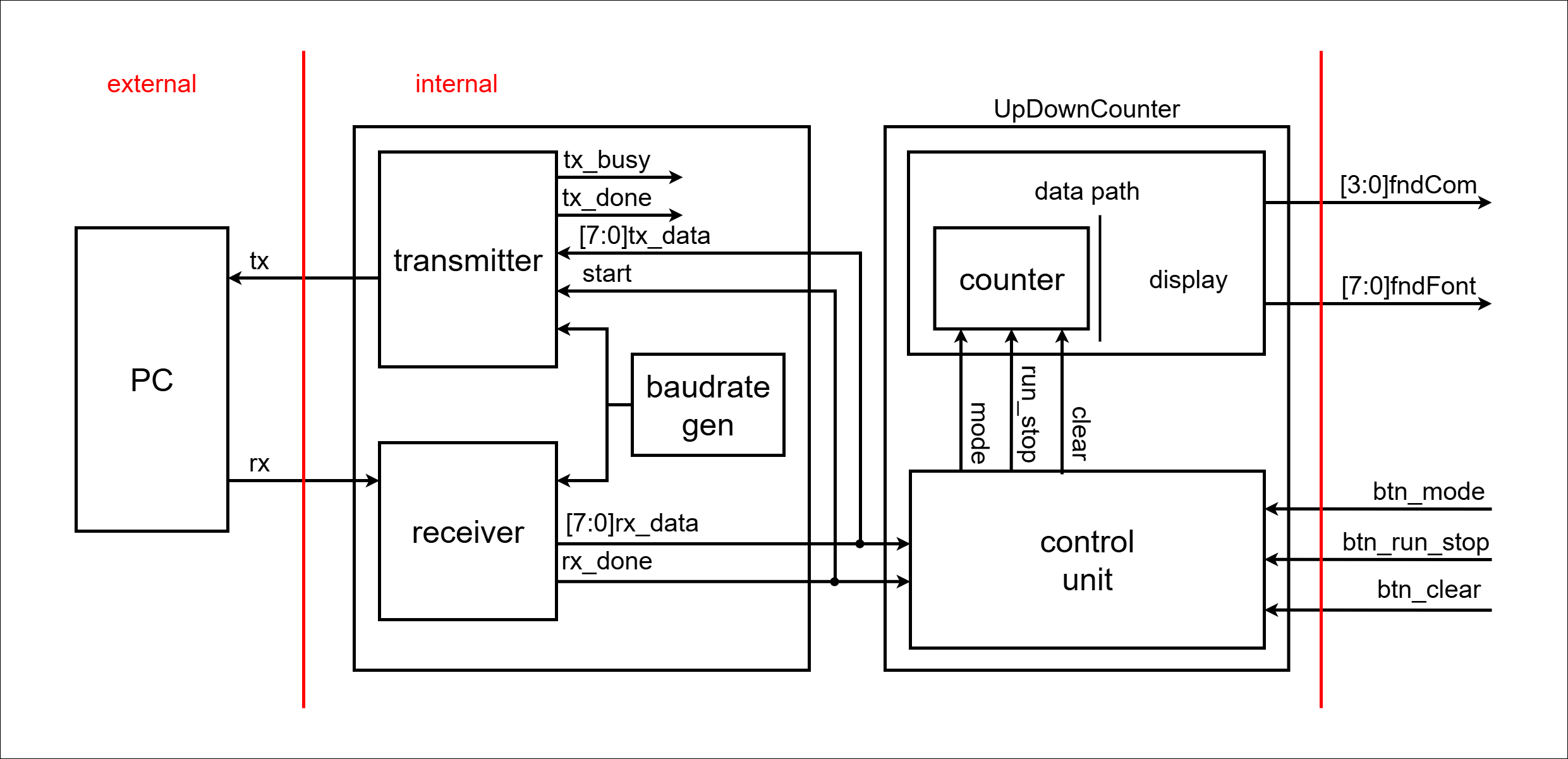
< Block Design >
< Code : uart >
`timescale 1ns / 1ps
module uart (
// global signal
input logic clk,
input logic reset,
// transmitter signal
input logic start,
input logic [7:0] tx_data,
output logic tx_busy,
output logic tx_done,
output logic tx,
// receiver signal
output logic [7:0] rx_data,
output logic rx_done,
input logic rx
);
logic br_tick;
baudrate_gen U_BRAUD_GEN (
.clk (clk),
.reset (reset),
.br_tick(br_tick)
);
transmitter U_Transmitter (
.clk (clk),
.reset (reset),
.br_tick(br_tick),
.start (start),
.tx_data(tx_data),
.tx_busy(tx_busy),
.tx_done(tx_done),
.tx (tx)
);
receiver U_Receiver (
.clk (clk),
.reset (reset),
.br_tick(br_tick),
.rx_data(rx_data),
.rx_done(rx_done),
.rx (rx)
);
endmodule
module baudrate_gen (
input logic clk,
input logic reset,
output logic br_tick
);
logic [$clog2(100_000_000 / 9600 / 16)-1:0] br_counter;
//logic [3:0] br_counter;
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
br_counter <= 0;
br_tick <= 1'b0;
end else begin
if (br_counter == 100_000_000 / 9600 / 16 - 1) begin
//if (br_counter == 10 - 1) begin
br_counter <= 0;
br_tick <= 1'b1;
end else begin
br_counter <= br_counter + 1;
br_tick <= 1'b0;
end
end
end
endmodule
module transmitter (
input logic clk,
input logic reset,
input logic br_tick,
input logic start,
input logic [7:0] tx_data,
output logic tx_busy,
output logic tx_done,
output logic tx
);
typedef enum {
IDLE,
START,
DATA,
STOP
} tx_state_e;
tx_state_e tx_state, tx_next_state;
logic [7:0] temp_data_reg, temp_data_next;
logic tx_reg, tx_next;
logic [3:0] tick_cnt_reg, tick_cnt_next;
logic [2:0] bit_cnt_reg, bit_cnt_next;
logic tx_done_reg, tx_done_next;
logic tx_busy_reg, tx_busy_next;
assign tx = tx_reg;
assign tx_busy = tx_busy_reg;
assign tx_done = tx_done_reg;
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
tx_state <= IDLE;
temp_data_reg <= 0;
tx_reg <= 1'b1;
tick_cnt_reg <= 0;
bit_cnt_reg <= 0;
tx_done_reg <= 0;
tx_busy_reg <= 0;
end else begin
tx_state <= tx_next_state;
temp_data_reg <= temp_data_next;
tx_reg <= tx_next;
tick_cnt_reg <= tick_cnt_next;
bit_cnt_reg <= bit_cnt_next;
tx_done_reg <= tx_done_next;
tx_busy_reg <= tx_busy_next;
end
end
always_comb begin
tx_next_state = tx_state;
temp_data_next = temp_data_reg;
tx_next = tx_reg;
tick_cnt_next = tick_cnt_reg;
bit_cnt_next = bit_cnt_reg;
tx_done_next = tx_done_reg;
tx_busy_next = tx_busy_reg;
case (tx_state)
IDLE: begin
tx_next = 1'b1;
tx_done_next = 0;
tx_busy_next = 0;
if (start) begin
tx_next_state = START;
temp_data_next = tx_data;
tick_cnt_next = 0;
bit_cnt_next = 0;
tx_busy_next = 1;
end
end
START: begin
tx_next = 1'b0;
if (br_tick) begin
if (tick_cnt_reg == 15) begin
tx_next_state = DATA;
tick_cnt_next = 0;
end else begin
tick_cnt_next = tick_cnt_reg + 1;
end
end
end
DATA: begin
tx_next = temp_data_reg[0];
if (br_tick) begin
if (tick_cnt_reg == 15) begin
tick_cnt_next = 0;
if (bit_cnt_reg == 7) begin
tx_next_state = STOP;
bit_cnt_next = 0;
end else begin
temp_data_next = {1'b0, temp_data_reg[7:1]};
bit_cnt_next = bit_cnt_reg + 1;
end
end else begin
tick_cnt_next = tick_cnt_reg + 1;
end
end
end
STOP: begin
tx_next = 1'b1;
if (br_tick) begin
if (tick_cnt_reg == 15) begin
tx_next_state = IDLE;
tx_done_next = 1;
tx_busy_next = 0;
tick_cnt_next = 0;
end else begin
tick_cnt_next = tick_cnt_reg + 1;
end
end
end
endcase
end
endmodule
module receiver (
input logic clk,
input logic reset,
input logic br_tick,
output logic [7:0] rx_data,
output logic rx_done,
input logic rx
);
typedef enum {
IDLE,
START,
DATA,
STOP
} rx_state_e;
rx_state_e rx_state, rx_next_state;
logic [4:0] tick_cnt_reg, tick_cnt_next;
logic [2:0] bit_cnt_reg, bit_cnt_next;
logic [7:0] rx_data_reg, rx_data_next;
logic rx_done_next, rx_done_reg;
assign rx_data = rx_data_reg;
assign rx_done = rx_done_reg;
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
rx_state <= IDLE;
tick_cnt_reg <= 0;
bit_cnt_reg <= 0;
rx_data_reg <= 0;
rx_done_reg <= 0;
end else begin
rx_state <= rx_next_state;
tick_cnt_reg <= tick_cnt_next;
bit_cnt_reg <= bit_cnt_next;
rx_data_reg <= rx_data_next;
rx_done_reg <= rx_done_next;
end
end
always_comb begin
rx_next_state = rx_state;
rx_done_next = rx_done;
tick_cnt_next = tick_cnt_reg;
bit_cnt_next = bit_cnt_reg;
rx_data_next = rx_data_reg;
case (rx_state)
IDLE: begin
rx_done_next = 0;
if (rx == 1'b0) begin
rx_next_state = START;
tick_cnt_next = 0;
bit_cnt_next = 0;
rx_data_next = 0;
end
end
START: begin
if (br_tick) begin
if (tick_cnt_reg == 7) begin
tick_cnt_next = 0;
rx_next_state = DATA;
end else begin
tick_cnt_next = tick_cnt_reg + 1;
end
end
end
DATA: begin
if (br_tick) begin
if (tick_cnt_reg == 15) begin
tick_cnt_next = 0;
rx_data_next = {rx, rx_data_reg[7:1]};
if (bit_cnt_reg == 7) begin
bit_cnt_next = 0;
rx_next_state = STOP;
end else begin
bit_cnt_next = bit_cnt_reg + 1;
end
end else begin
tick_cnt_next = tick_cnt_reg + 1;
end
end
end
STOP: begin
if (br_tick) begin
if (tick_cnt_reg == 23) begin
tick_cnt_next = 0;
rx_done_next = 1;
rx_next_state = IDLE;
end else begin
tick_cnt_next = tick_cnt_reg + 1;
end
end
end
endcase
end
endmodule
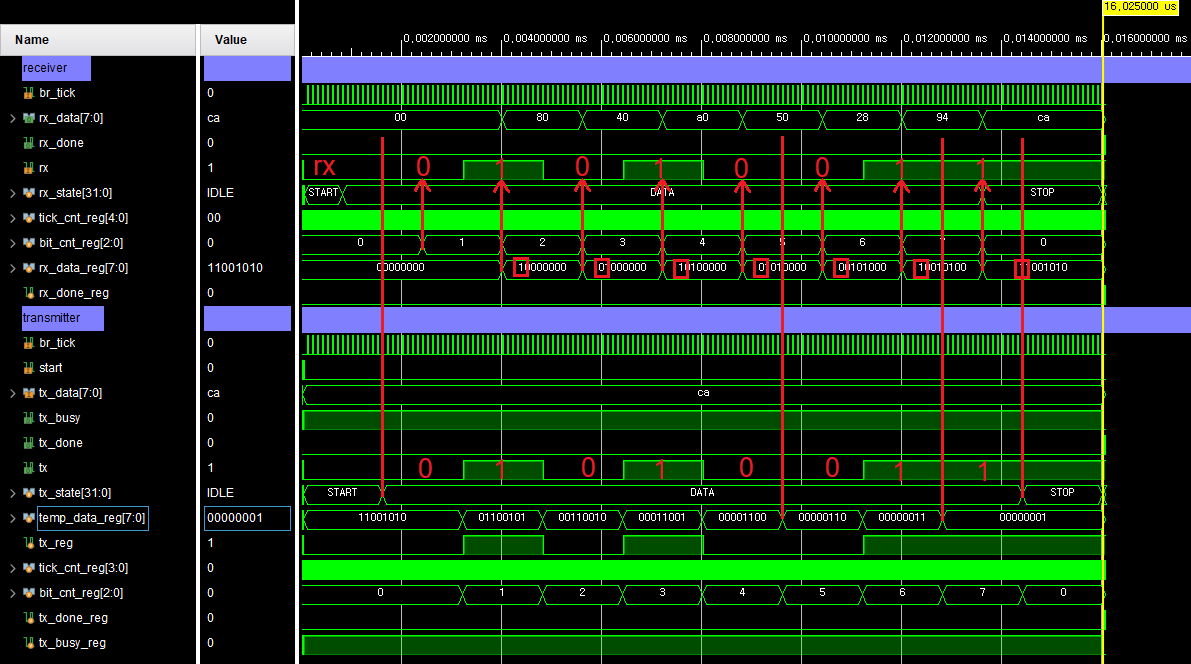
< Simulation : uart >
< Code : UpDownCounter >
`timescale 1ns / 1ps
module UpDownCounter (
input logic clk,
input logic reset,
input logic btn_mode,
input logic btn_run_stop,
input logic btn_clear,
input logic [ 7:0] rx_data,
input logic rx_done,
output logic [ 1:0] led_mode,
output logic [ 1:0] led_run_stop,
output logic [13:0] count
);
logic tick_10hz;
logic mode, run_stop, clear;
clk_div_10hz U_CLK_DIV_10hz (
.clk (clk),
.reset (reset),
.run_stop (run_stop),
.clear (clear),
.tick_10hz(tick_10hz)
);
up_down_counter U_UP_DOWN_COUNTER (
.clk (clk),
.reset(reset),
.tick (tick_10hz),
.mode (mode),
.clear(clear),
.count(count)
);
control_unit U_CU (
.clk (clk),
.reset (reset),
.btn_mode (btn_mode),
.btn_run_stop(btn_run_stop),
.btn_clear (btn_clear),
.rx_data (rx_data),
.rx_done (rx_done),
.mode (mode),
.run_stop (run_stop),
.clear (clear),
.led_mode (led_mode),
.led_run_stop(led_run_stop)
);
endmodule
// ...
module control_unit (
input logic clk,
input logic reset,
input logic btn_mode,
input logic btn_run_stop,
input logic btn_clear,
input logic [7:0] rx_data,
input logic rx_done,
output logic mode,
output logic run_stop,
output logic clear,
output logic [1:0] led_mode,
output logic [1:0] led_run_stop
);
/************************** MODE FSM **************************/
typedef enum {
UP,
DOWN
} state_mode_e;
state_mode_e state_mode, next_state_mode;
// transition logic
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
state_mode <= UP;
end else begin
state_mode <= next_state_mode;
end
end
// output logic
always_comb begin
next_state_mode = state_mode;
mode = 0;
led_mode = 2'b00;
case (state_mode)
UP: begin
led_mode = 2'b01;
mode = 0;
if (btn_mode) begin
next_state_mode = DOWN;
end
if (rx_done) begin
if (rx_data == 8'h4d || rx_data == 8'h6d) begin // M, m
next_state_mode = DOWN;
end
end
end
DOWN: begin
led_mode = 2'b10;
mode = 1;
if (btn_mode) begin
next_state_mode = UP;
end
if (rx_done) begin
if (rx_data == 8'h4d || rx_data == 8'h6d) begin // M, m
next_state_mode = UP;
end
end
end
endcase
end
/********************* RUN STOP CLEAR FSM *********************/
typedef enum {
STOP,
RUN,
CLEAR
} state_counter_e;
state_counter_e state_counter, next_state_counter;
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
state_counter <= STOP;
end else begin
state_counter <= next_state_counter;
end
end
always_comb begin
next_state_counter = state_counter;
run_stop = 0;
clear = 0;
led_run_stop = 2'b00;
case (state_counter)
STOP: begin
led_run_stop = 2'b01;
if (btn_run_stop) next_state_counter = RUN;
else if (btn_clear) next_state_counter = CLEAR;
if (rx_done) begin
if (rx_data == 8'h52 || rx_data == 8'h72) begin // R, r
next_state_counter = RUN;
end
end
if (rx_done) begin
if (rx_data == 8'h43 || rx_data == 8'h63) begin // C, c
next_state_counter = CLEAR;
end
end
end
RUN: begin
run_stop = 1;
led_run_stop = 2'b10;
if (btn_run_stop) next_state_counter = STOP;
if (rx_done) begin
if (rx_data == 8'h53 || rx_data == 8'h73) begin // S, s
next_state_counter = STOP;
end
end
end
CLEAR: begin
clear = 1;
next_state_counter = STOP;
end
endcase
end
endmodule
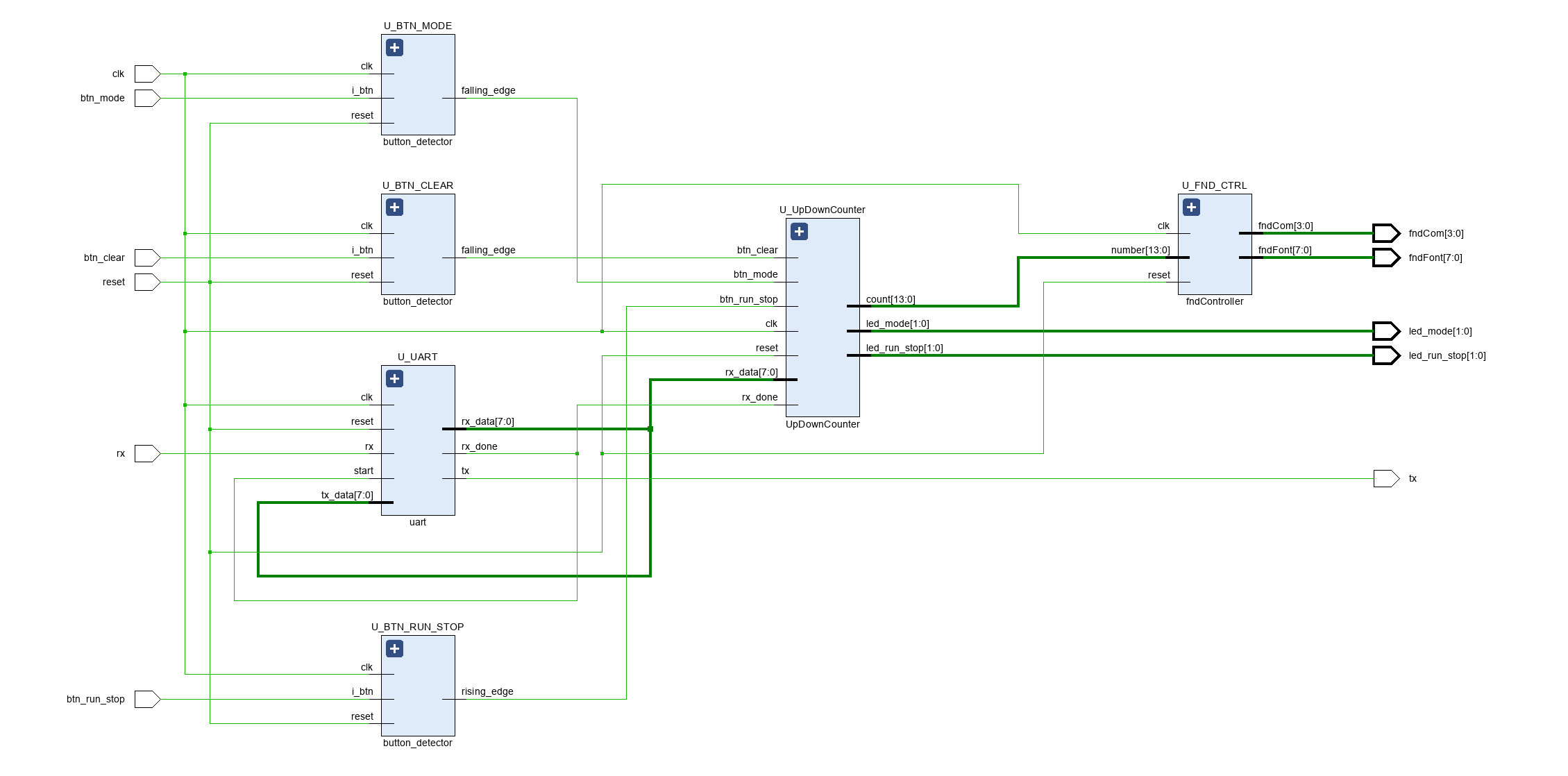
< Schematic >
< 파일 >
sources (Class)
simulation (Class)
constrs (Class)
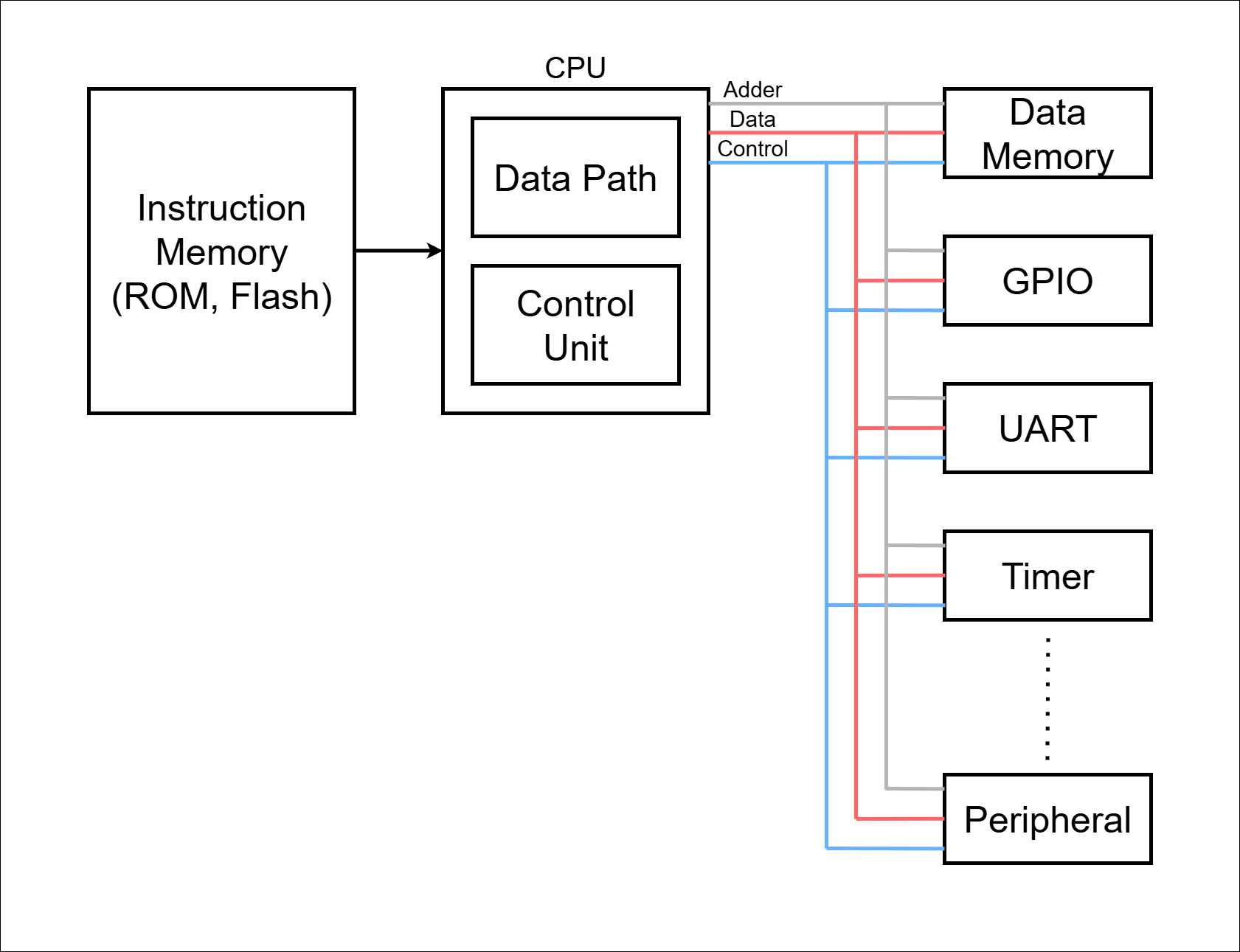
CPU
CISC(Complex Instruction Set Computer)
- micro processor에게 명령을 내리는데 필요한 모든 명령어 셋을 갖추고 있는 processor이다. 따라서 복잡하고 기능이 많은 명령어로 구성되어있다.
- 과거에는 컴퓨터 메모리 용량이 크지 않아서 sw 프로그램의 용량을 줄이기 위해 하나의 명령어로 여러 작업을 수행하도록 했기 때문에 CISC를 많이 사용하였다.
- 장점: 복합적이고 기능이 많기 때문에 하위 호환성?이 좋다. 따라서 호환성이 절대적으로 필요한 PC 환경에서는 CISC를 사용하는 것이 좋다.
- 단점: 하지만 트랜지스터 집적에 있어서 효율성이 떨어지기 때문에 성능 향상을 방해하는 요인이 될 수 있으며, 전력 소모가 크고, 가격이 비싸다는 등의 단점이 있다.
- 용도: 다양한 명령어를 포함하고 있어 일반적으로 우리가 사용하는 범용 컴퓨터(general purpose computer)의 CPU로 많이 사용된다.
RISC(Reduced Instruction Set Computer)
- CISC 내부에 갖추어진 모든 명령어들 중 불과 20%에 해당하는 명령어들만이 전체 80% 이상의 일을 처리한다. 따라서 CISC와 같이 필요한 모든 명령어 셋을 갖고 있는 것은 비효율적일 수 있다. 이를 극복하기 위해 등장한 것이 RISC이다.
- 장점: RISC는 적은 수의 명령어들(사용 빈도가 높은 20%의 명령어들)로 구성된 processor이다. 따라서 CISC보다 더 빠른 속도?로 동작할 수 있으며, 단순하고, 전력소모가 적고, 가격도 저렴하다. (Tr 갯수 ↓)
- 단점: 하지만 하드웨어가 간단한 대신 소프트웨어(Compiler)가 크고 복잡해졌으며, 하위 호환성이 부족하다는 단점이 있다.
- 용도: RISC 구조는 파이프라인 중첩이 가능해서 같은 수의 명령어에 대해 적은 clock으로 처리가 가능하며 발열과 전력 소모도 줄일 수 있다. 따라서 임베디드 프로세서에서는 RISC 구조를 많이 사용한다. (MIPS, ARM)
앞으로의 학습 및 구현 계획
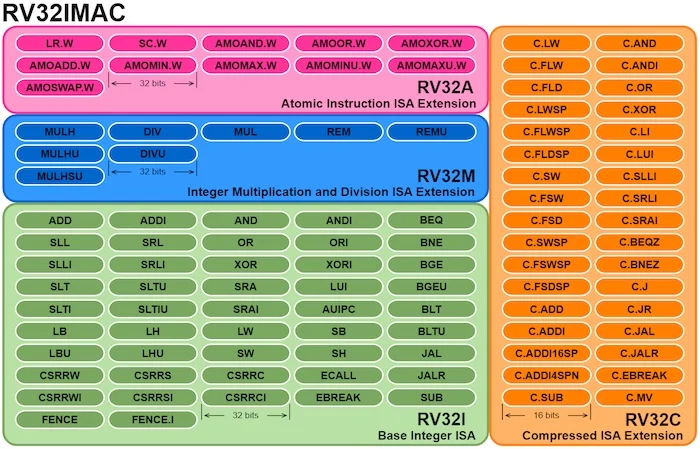
- RISC-V Instruction Set 이해
- RV32I (Base Integer ISA) 구현
- 1.Single-Cycle Processor (모든 명령어를 1 클럭 내에 실행)
- 2.Multi-Cycle Processor (명령어 종류에 따라 실행 클럭 수가 다름)
- 3.Pipeline 구조 CPU (선택 사항 / 미구현 예정)
DedicatedProcessor_Counter Design
< Design Specification >
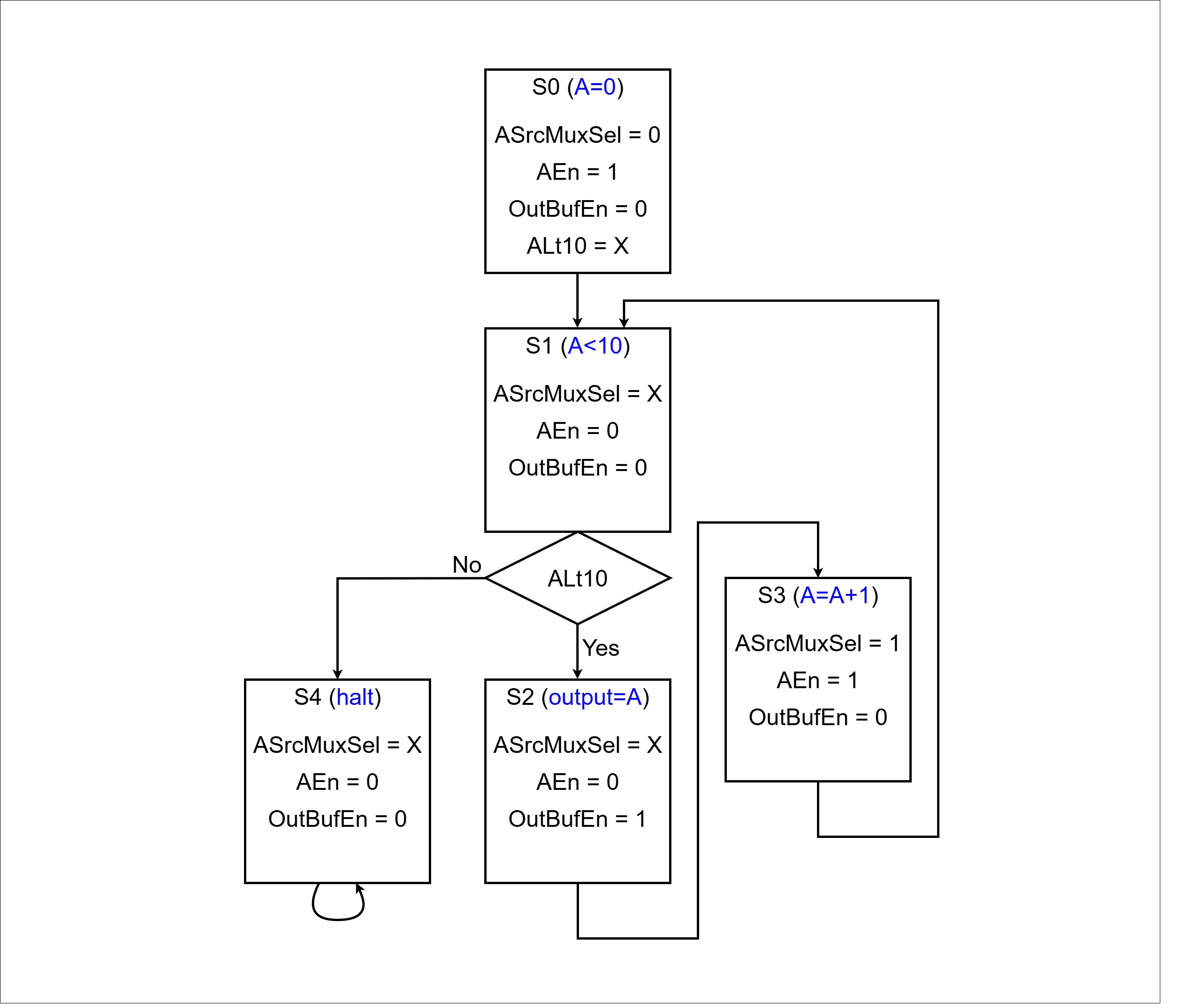
- 0~9 까지 카운트하는 Processor를 설계
- A = 0 (Data)
< C 언어 >
A = 0;
while (A < 10) {
output = A;
A = A + 1;
}
halt;
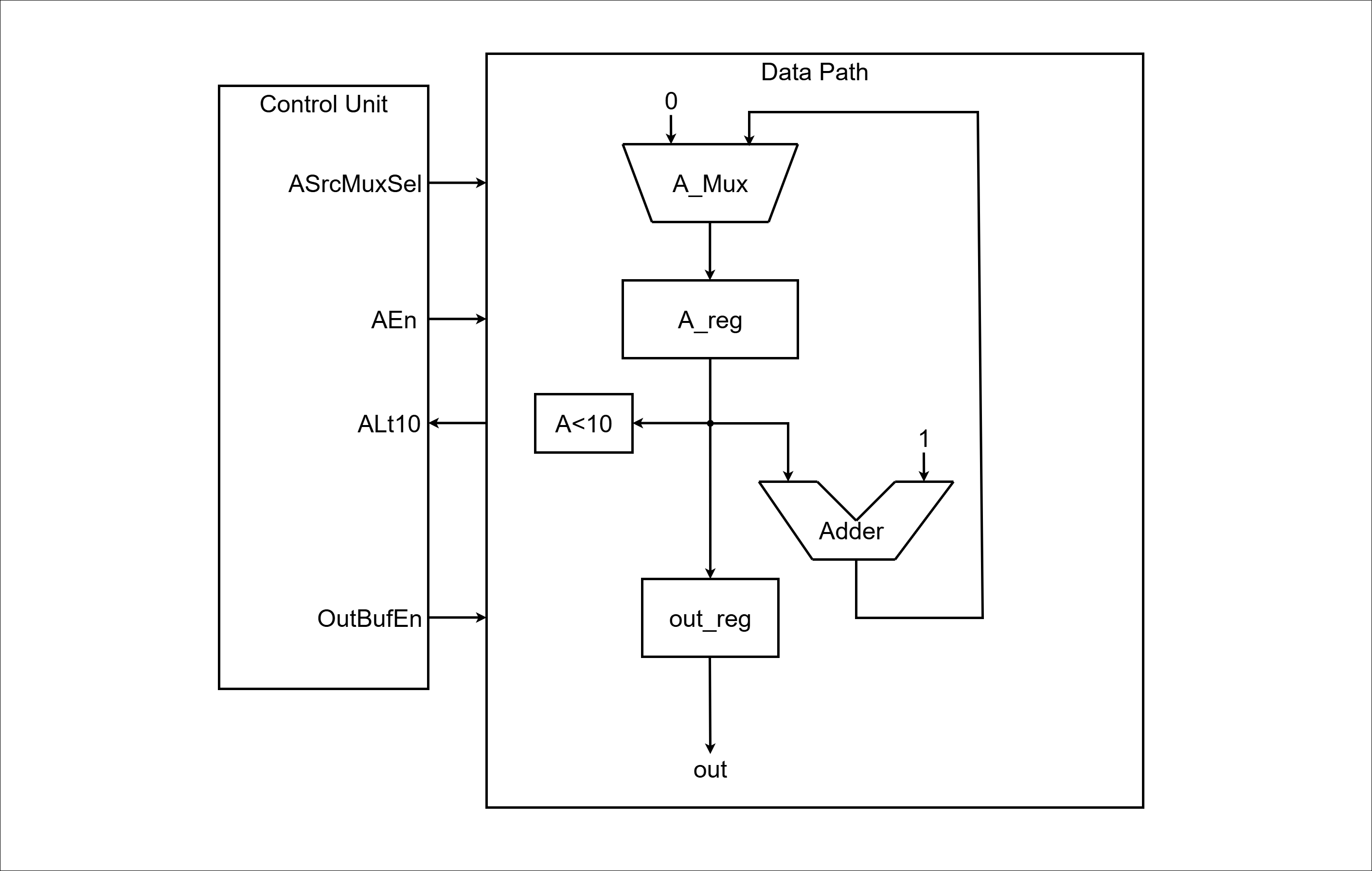
< Data Path >
< ASM >
< Code : DedicatedProcessor_Counter >
`timescale 1ns / 1ps
module DedicatedProcessor_Counter (
input logic clk,
input logic reset,
output logic [7:0] OutBuffer
);
logic ASrcMuxSel;
logic AEn;
logic ALt10;
logic OutBufEn;
logic [$clog2(10_000_000)-1:0] div_counter;
logic clk_10hz;
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
div_counter <= 0;
end else begin
if (div_counter == 10_000_000 - 1) begin
div_counter <= 0;
clk_10hz <= 1'b1;
end else begin
div_counter <= div_counter + 1;
clk_10hz <= 1'b0;
end
end
end
ControlUnit U_ControlUnit (
.clk(clk_10hz), // bitstream
.*
);
DataPath U_DataPath (
.clk(clk_10hz), // bitstream
.*
);
endmodule
module Register (
input logic clk,
input logic reset,
input logic en,
input logic [7:0] d,
output logic [7:0] q
);
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
q <= 0;
end else begin
if (en) begin
q <= d;
end
end
end
endmodule
module Mux_2x1 (
input logic sel,
input logic [7:0] x0,
input logic [7:0] x1,
output logic [7:0] y
);
always_comb begin
y = 8'b0;
case (sel)
1'b0: y = x0;
1'b1: y = x1;
endcase
end
endmodule
module Adder (
input logic [7:0] a,
input logic [7:0] b,
output logic [7:0] sum
);
assign sum = a + b;
endmodule
module Comparator (
input logic [7:0] a,
input logic [7:0] b,
output logic lt
);
assign lt = a < b;
endmodule
module OutBuf (
input logic en,
input logic [7:0] x,
output logic [7:0] y
);
assign y = en ? x : 8'bx;
endmodule
module ControlUnit (
input logic clk,
input logic reset,
input logic ALt10,
output logic ASrcMuxSel,
output logic AEn,
output logic OutBufEn
);
typedef enum {
S0,
S1,
S2,
S3,
S4
} state_e;
state_e state, next_state;
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
state <= S0;
end else begin
state <= next_state;
end
end
always_comb begin
ASrcMuxSel = 0;
AEn = 0;
OutBufEn = 0;
next_state = state;
case (state)
S0: begin
ASrcMuxSel = 0;
AEn = 1;
OutBufEn = 0;
next_state = S1;
end
S1: begin
ASrcMuxSel = 1;
AEn = 0;
OutBufEn = 0;
if (ALt10) next_state = S2;
else next_state = S4;
end
S2: begin
ASrcMuxSel = 1;
AEn = 0;
OutBufEn = 1;
next_state = S3;
end
S3: begin
ASrcMuxSel = 1;
AEn = 1;
OutBufEn = 0;
next_state = S1;
end
S4: begin
ASrcMuxSel = 1;
AEn = 0;
OutBufEn = 0;
next_state = S4;
end
endcase
end
endmodule
module DataPath (
input logic clk,
input logic reset,
input logic ASrcMuxSel,
input logic AEn,
input logic OutBufEn,
output logic ALt10,
output logic [7:0] OutBuffer
);
logic [7:0] AdderResult, ASrcMuxOut, ARegOut;
Mux_2x1 U_ASrcMux (
.sel(ASrcMuxSel),
.x0 (8'b0),
.x1 (AdderResult),
.y (ASrcMuxOut)
);
Register U_A_Reg (
.clk (clk),
.reset(reset),
.en (AEn),
.d (ASrcMuxOut),
.q (ARegOut)
);
Comparator U_ALt10 (
.a (ARegOut),
.b (8'd10),
.lt(ALt10)
);
Adder U_Adder (
.a (ARegOut),
.b (8'd1),
.sum(AdderResult)
);
// OutBuf U_OutBuf (
// .en(OutBufEn),
// .x (ARegOut),
// .y (OutBuffer)
// );
Register U_OutReg (
.clk (clk),
.reset(reset),
.en (OutBufEn),
.d (ARegOut),
.q (OutBuffer)
);
endmodule
< Comment >
DataPath
Comparator 출력(ALt10)은 C의 while (A < 10)을 하드웨어로 치환한 제어 분기 입력으로 필수다.
레지스터별 Enable은 A 업데이트와 출력 샘플링의 타이밍을 독립 제어해 정확한 순서·정지·초기화를 보장한다.
동일 엣지에서 OutReg와 AReg를 함께 샘플링함으로써 C의 “output=A; A=A+1;”를 클럭 하나로 정확히 구현한다.
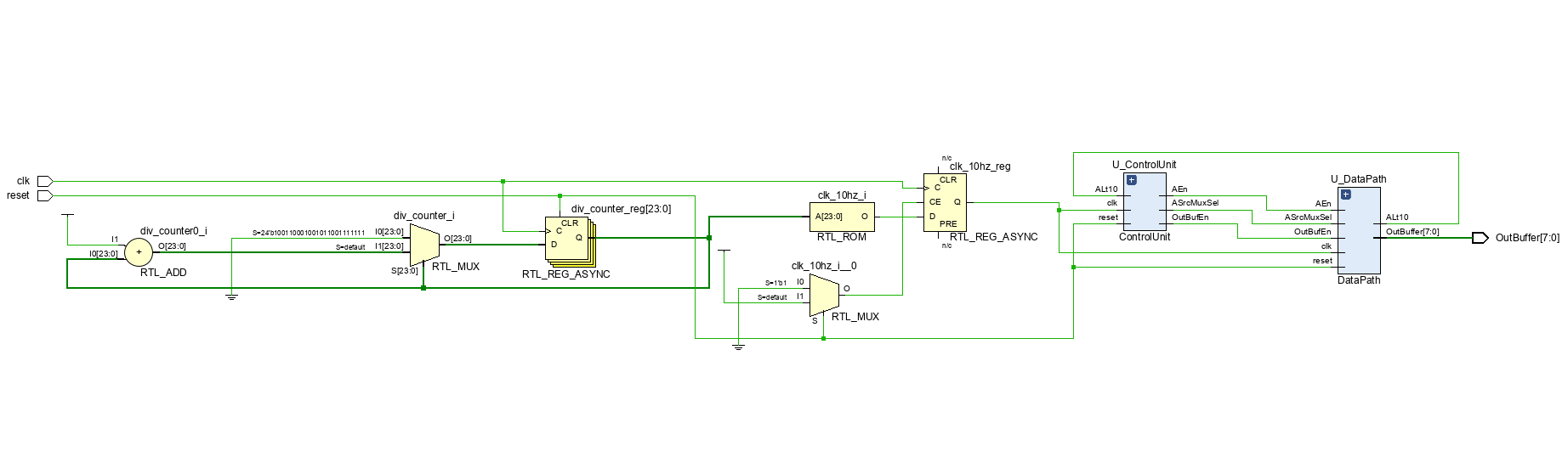
< Schematic >
< Simulation >

< 파일 >
sources (Class)
simulation (Class)
constrs (Class)
Homework
< Design Specification >
- 0+1+2+3+…+9+10 = 55 와 같이 누적으로 덧셈 결과 출력이 되도록 구현
- FND에 누적 값을 출력
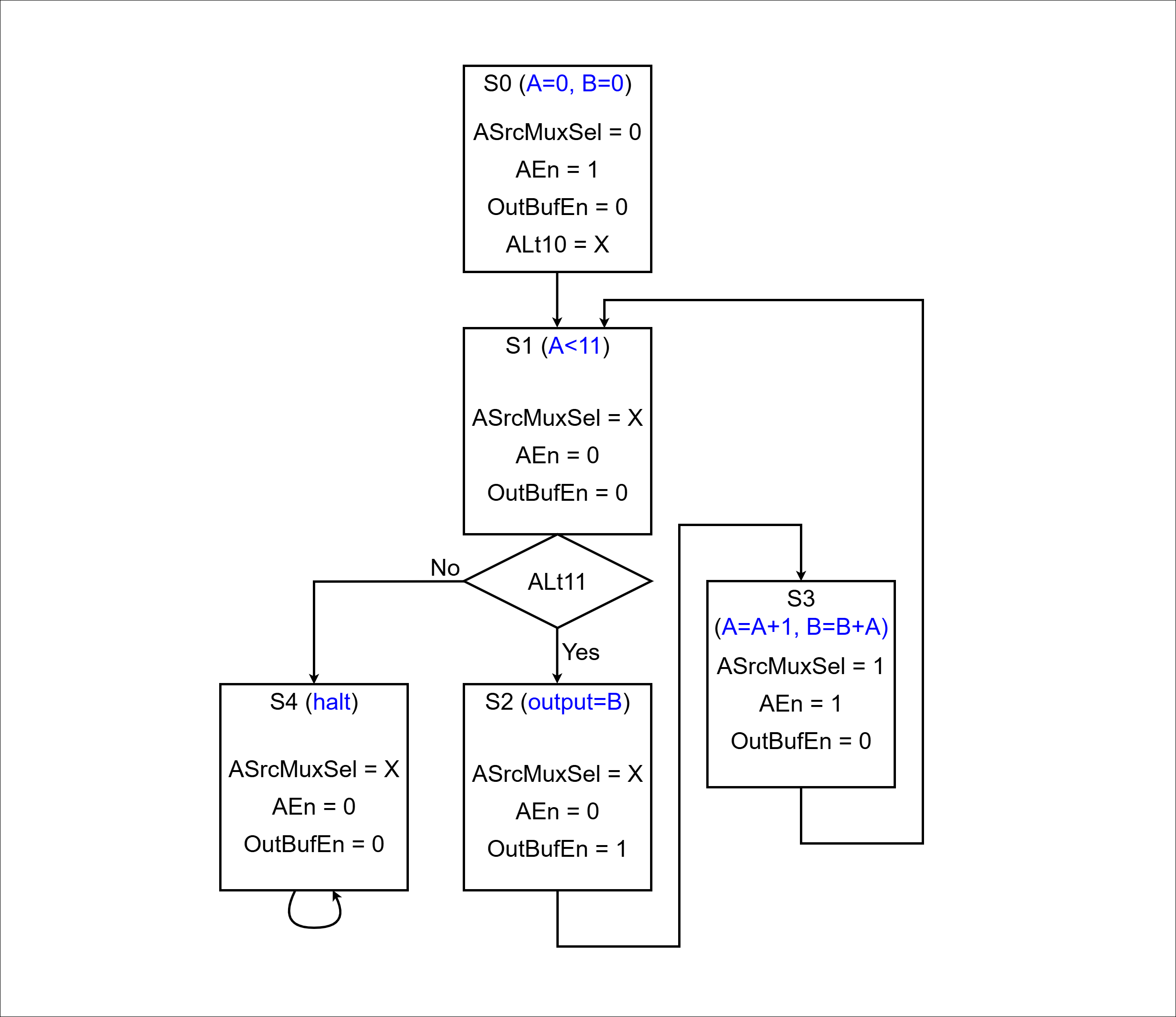
< C 언어 >
a = 0;
b = 0;
while (a <= 10) {
b = b + a; // 누적
a = a + 1; // 증가
}
output = b; // 55
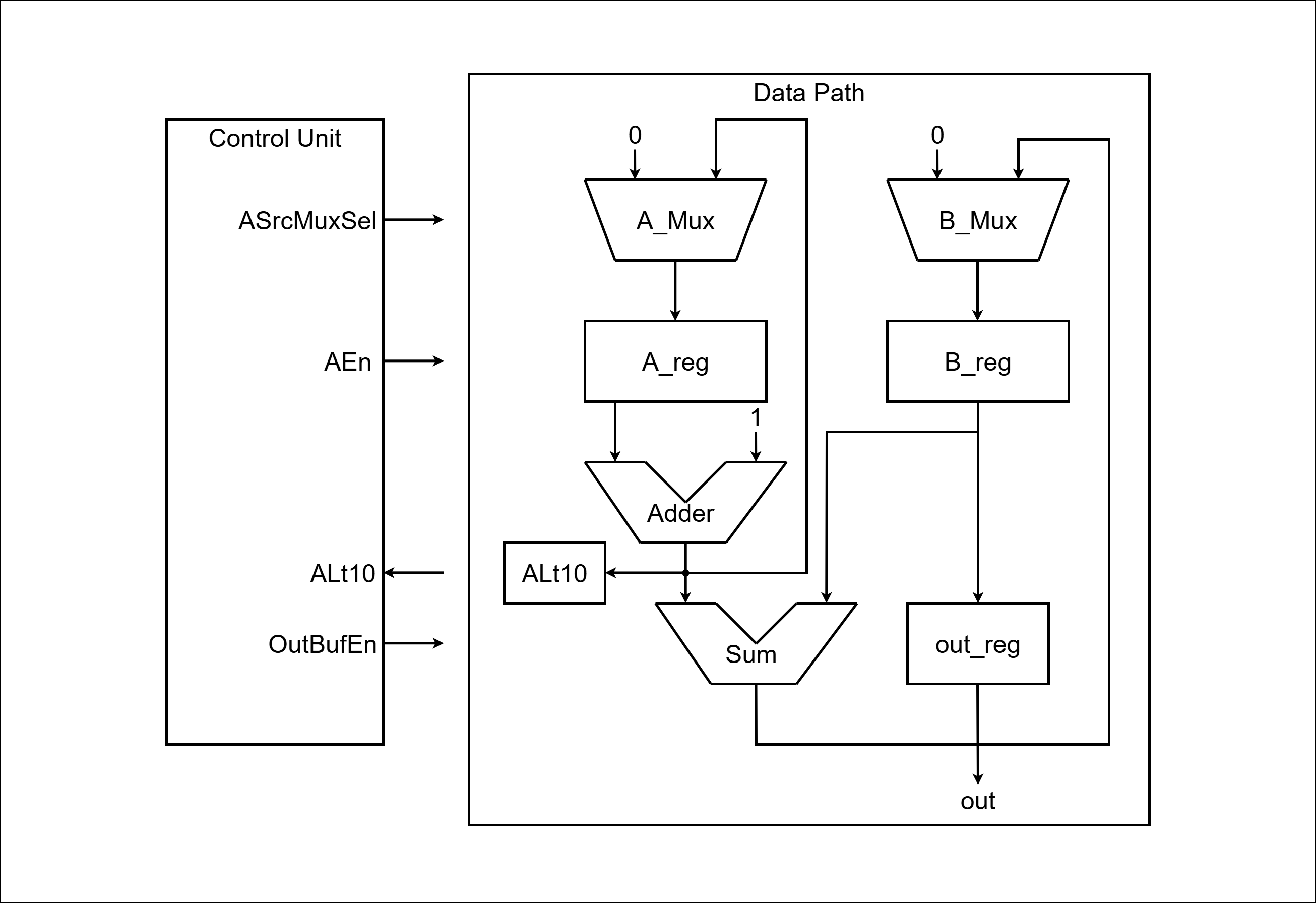
< Data Path >
< ASM >
< Code : top >
`timescale 1ns / 1ps
module top (
input logic clk,
input logic reset,
output logic [3:0] fndCom,
output logic [7:0] fndFont
);
logic [7:0] data;
DedicatedProcessor U_DedicatedProcessor (
.clk(clk),
.reset(reset),
.OutBuffer(data)
);
fndController U_fndController (
.clk(clk),
.reset(reset),
.number(data),
.fndCom(fndCom),
.fndFont(fndFont)
);
endmodule
< Code : DedicatedProcessor (DataPath) >
//...
module DataPath (
input logic clk,
input logic reset,
input logic ASrcMuxSel,
input logic AEn,
input logic OutBufEn,
output logic ALt10,
output logic [7:0] OutBuffer
);
logic [7:0] AdderResult, ASrcMuxOut, ARegOut;
logic [7:0] SumResult, BSrcMuxOut, BRegOut;
Mux_2x1 U_ASrcMux (
.sel(ASrcMuxSel),
.x0 (8'b0),
.x1 (AdderResult),
.y (ASrcMuxOut)
);
Register U_A_Reg (
.clk (clk),
.reset(reset),
.en (AEn),
.d (ASrcMuxOut),
.q (ARegOut)
);
Comparator U_ALt10 (
.a (ARegOut),
.b (8'd11), // 8'd11
.lt(ALt10)
);
Adder U_Adder (
.a (ARegOut),
.b (8'd1),
.sum(AdderResult)
);
// OutBuf U_OutBuf (
// .en(OutBufEn),
// .x (ARegOut),
// .y (OutBuffer)
// );
// Register U_OutReg (
// .clk (clk),
// .reset(reset),
// .en (OutBufEn),
// .d (ARegOut),
// .q (OutBuffer)
// );
/*************** B ***************/
Mux_2x1 U_BSrcMux (
.sel(ASrcMuxSel),
.x0 (8'b0),
.x1 (SumResult),
.y (BSrcMuxOut)
);
Register U_B_Reg (
.clk (clk),
.reset(reset),
.en (AEn),
.d (BSrcMuxOut),
.q (BRegOut)
);
Adder U_Sum (
.a (AdderResult),
.b (BRegOut),
.sum(SumResult)
);
Register U_OutReg (
.clk (clk),
.reset(reset),
.en (OutBufEn),
.d (BRegOut),
.q (OutBuffer)
);
endmodule
//...
< Comment >
DataPath
누적값(B)에 현재 항(A 또는 A+1)을 더하는 덧셈기와 누적값을 저장하는 레지스터(B Reg)를 추가
A와 B는 동일한 Enable(AEn)과 초기화 경로(ASrcMuxSel=0)를 공유하여 루프 갱신 시 동시 업데이트가 가능
출력 레지스터를 두어 글리치 방지와 타이밍 여유를 확보
< simulation >

< Video >
< 고찰 >
DataPath에 누적기 경로를 추가함으로써, 단순 카운트가 아닌 누적 연산까지 지원하는 구조를 구현할 수 있었다.
각 레지스터의 Enable과 조건 제어를 통해 출력 안정성과 연산 정확성을 확보하였다.
< 파일 >
sources (Homework)
simulation (Homework)
constrs (Homework)