
디지털 회로 기본 및 타이밍 특성
D-flip flop , Latch 차이
- 메모리 기능의 유무 → 둘 다 메모리 기능이 있지만, 동작 방식에 차이가 있음
- Latch: 입력 신호가 활성화된 동안 값을 계속 반영함 (레벨 민감)
- D Flip-Flop: 클록 상승/하강 에지에서만 값을 반영 (엣지 트리거)
조합회로 (Combinational Circuit)
- 현재 입력에 의해서만 출력이 결정됨
- 과거 입력이나 상태와는 무관
- 예시: AND, OR, MUX, Decoder 등
순차회로 (Sequential Circuit)
- 클록 신호에 따라 동작 (동기식 설계)
- 출력은 현재 입력 + 이전 상태에 의존
- 예시: D Flip-Flop, 레지스터, FSM 등
SR Latch
- S=0, R=0 → Q=유지, Q′=유지 → 정상 상태 (Hold)
- S=0, R=1 → Q=0, Q′=1 → Reset 동작
- S=1, R=0 → Q=1, Q′=0 → Set 동작
- S=1, R=1 → Q=0, Q′=0 → 금지 상태 (Invalid)
D Latch
- D=0, S=0, R=1 → Reset
- D=1, S=1, R=0 → Set
Gated D Latch
- Gate=0, D=x, Q=유지, Q’=유지 → Hold 상태
- Gate=1, D=0, Q=0, Q’=1 → Reset 동작
- Gate=1, D=1, Q=1, Q’=0 → Set 동작
D-Filp Flop
- D Flip-Flop은 Master-Slave 구조의 두 개의 D-Latch로 구성
- Master: 클록이 0일 때 입력 값을 저장
- Slave: 클록이 1일 때 Master의 값을 출력에 전달
- 따라서 클록의 상승/하강 엣지에만 출력이 바뀜 (엣지 트리거)
Metastability
- 클록 엣지 시점에 입력(D)이 변할 경우, 출력(Q)이 일정 시간 동안 정의되지 않은 상태에 머무를 수 있음
- Setup Time: 클록 엣지 이전 일정 시간 동안 D 입력이 안정적으로 유지되어야 함
- Hold Time: 클록 엣지 이후 일정 시간 동안도 D 입력이 유지되어야 함
Metastability 방지 방법 – 동기화 회로 (Synchronizer)
- 외부 신호(비동기 입력 등)는 클록 도메인에 따라 metastable 위험이 있음
- D Flip-Flop을 2개 이상 직렬로 연결
- 첫 번째 F/F는 신호를 잠시 받아들이고
- 두 번째 F/F는 클록에 동기화된 안정된 출력을 생성
Glitch (순간 출력 오류)
- 조합 회로에서 입력이 동시에 변할 때, 내부 게이트의 전파 지연 차이로 인해 일시적인 잘못된 출력이 발생할 수 있음
- 클록 엣지 직전까지 출력이 안정되지 않으면 시스템 오동작 가능성 존재
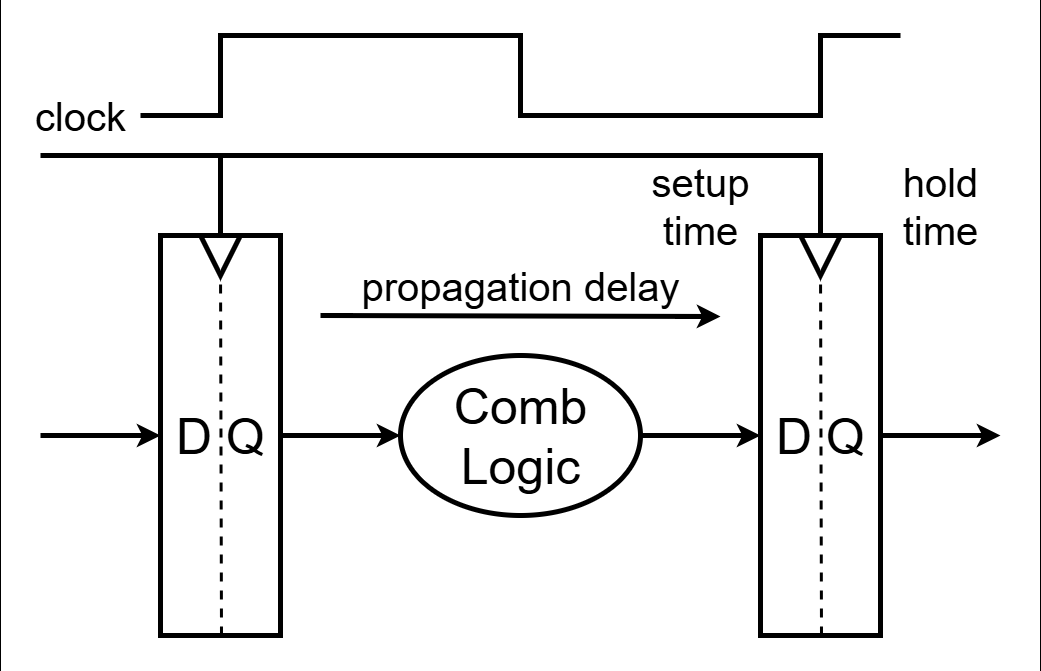
Propagation Delay (전파 지연)
- 입력 변화 이후 출력이 안정될 때까지의 시간 지연
- 조합 회로가 복잡하거나 깊이가 깊을수록 지연 시간이 길어짐
- 예: FFT filter 설계 시 곱셈 연산은 시간이 오래 걸리므로, 중간에 레지스터를 삽입하여 처리
Pipeline 처리
- 연산 중간에 레지스터를 추가하여 연산 단계를 여러 클록 사이클로 분할
- 조합 논리의 길이를 줄여 glitch를 방지할 수 있음
- 복잡한 연산을 분할 처리해 클록 타이밍 여유 확보 가능
- 한 클럭 내에 연산이 끝나도록 회로를 구성하면 안정적인 시스템 설계 가능
Button_Detector Design
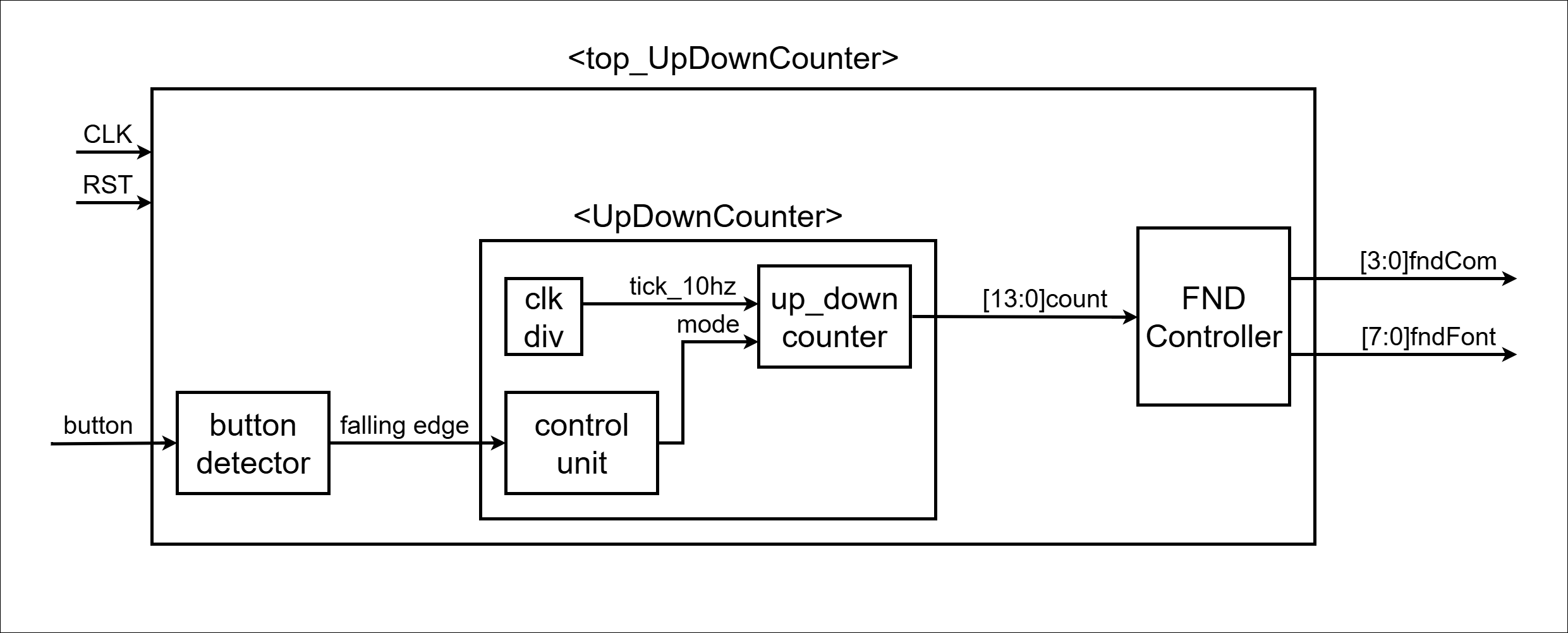
< Block Diagram >
< Code : button_detector >
`timescale 1ns / 1ps
module button_detector (
input logic clk,
input logic reset,
input logic i_btn,
output logic rising_edge,
output logic falling_edge,
output logic both_edge
);
logic clk_1khz;
logic debounce;
logic [ 7:0] shift_reg;
logic [$clog2(100_000)-1:0] div_counter;
// create 1kHz pulse (for button sampling)
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
div_counter <= 0;
clk_1khz <= 1'b0;
end else begin
if (div_counter == 100_000 - 1) begin
div_counter <= 0;
clk_1khz <= 1'b1;
end else begin
div_counter <= div_counter + 1;
clk_1khz <= 1'b0;
end
end
end
shift_register U_SHIFT_REG (
.clk (clk_1khz),
.reset (reset),
.i_data(i_btn),
.o_data(shift_reg)
);
assign debounce = &shift_reg;
// assign o_btn = debounce;
logic [1:0] edge_reg;
// edge detector (rising/falling/both)
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
edge_reg <= 0;
end else begin
edge_reg[0] <= debounce;
edge_reg[1] <= edge_reg[0];
end
end
assign rising_edge = edge_reg[0] & ~edge_reg[1];
assign falling_edge = ~edge_reg[0] & edge_reg[1];
assign both_edge = rising_edge | falling_edge;
endmodule
module shift_register (
input logic clk,
input logic reset,
input logic i_data,
output logic [7:0] o_data
);
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
o_data <= 0;
end else begin
o_data <= {i_data, o_data[7:1]}; // right shift
//o_data <= {o_data[6:0], i_data};// left shift
end
end
endmodule
< Comment >
shift_register
시프트 레지스터의 기본 형태를 구현한 예시로, 구조와 동작 원리를 익혀두면 좋다.
Right shift : 새로운 입력(i_data)이 MSB 위치로 들어가고, 기존 데이터는 오른쪽(LSB 방향)으로 한 비트씩 이동한다.
Left shift : 새로운 입력(i_data)이 LSB 위치로 들어가고, 기존 데이터는 왼쪽(MSB 방향)으로 한 비트씩 이동한다.
edge detector
edge_reg를 통해 현재 debounce와 직전 상태를 저장.
rising_edge : 0→1 변화를 검출.
falling_edge : 1→0 변화를 검출.
both_edge : 상승 또는 하강 변화를 모두 검출.
< Code : UpDownCounter >
`timescale 1ns / 1ps
module UpDownCounter (
input logic clk,
input logic reset,
input logic button,
output logic [13:0] count
);
logic tick_10hz;
logic mode;
clk_div_10hz U_CLK_DIV_10hz (
.clk (clk),
.reset (reset),
.tick_10hz(tick_10hz)
);
up_down_counter U_UP_DOWN_COUNTER (
.clk (clk),
.reset(reset),
.tick (tick_10hz),
.mode (mode),
.count(count)
);
control_unit U_CU (
.clk(clk),
.reset(reset),
.button(button),
.mode(mode)
);
endmodule
module up_down_counter (
input logic clk,
input logic reset,
input logic tick,
input logic mode,
output logic [13:0] count
);
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
count <= 0;
end else begin
if (mode == 1'b0) begin // up counter
if (tick) begin
if (count == 9999) begin
count <= 0;
end else begin
count <= count + 1;
end
end
end else begin // down counter
if (tick) begin
if (count == 0) begin
count <= 9999;
end else begin
count <= count - 1;
end
end
end
end
end
endmodule
module clk_div_10hz (
input logic clk,
input logic reset,
output logic tick_10hz
);
//logic [23:0] div_counter;
logic [$clog2(10_000_000)-1:0] div_counter;
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
div_counter <= 0;
tick_10hz <= 1'b0;
end else begin
if (div_counter == 10_000_000 - 1) begin
div_counter <= 0;
tick_10hz <= 1'b1;
end else begin
div_counter <= div_counter + 1;
tick_10hz <= 1'b0;
end
end
end
endmodule
module control_unit (
input logic clk,
input logic reset,
input logic button,
output logic mode
);
typedef enum {
UP,
DOWN
} state_e;
state_e state, next_state;
// transition logic
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
state <= UP;
end else begin
state <= next_state;
end
end
// output logic
always_comb begin
next_state = state;
case (state)
UP: begin
mode = 0;
if (button) begin
next_state = DOWN;
end
end
DOWN: begin
mode = 1;
if (button) begin
next_state = UP;
end
end
endcase
end
endmodule
< Comment >
control_unit
버튼 입력에 따라 UP, DOWN 상태를 전환하는 FSM을 구현
typedef enum을 사용하여 상태 이름(UP, DOWN)을 열거형으로 선언
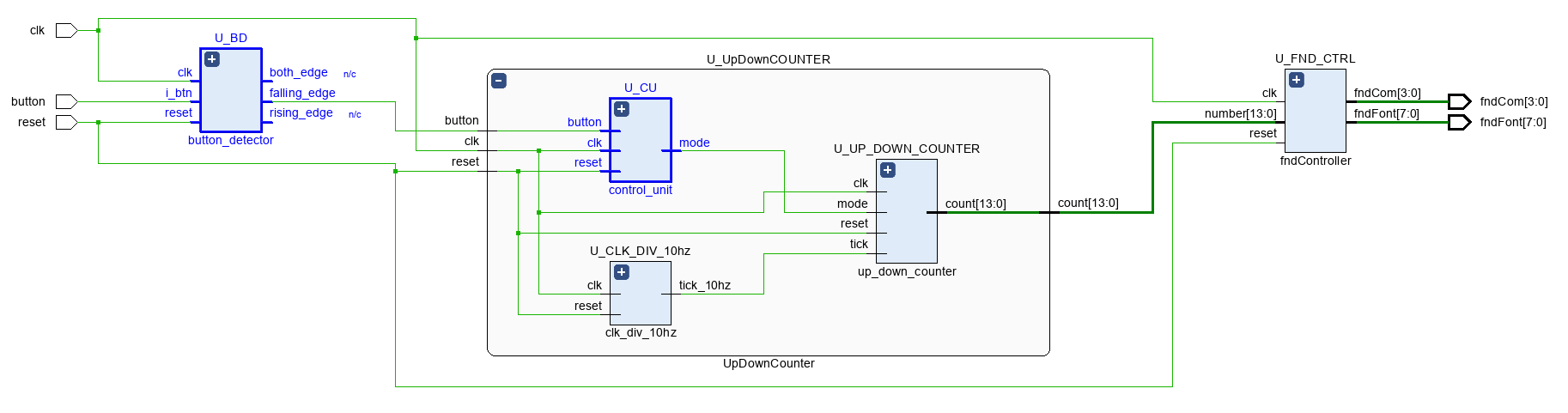
< Schematic >
< 파일 >
sources (Class)
constrs (Class)
Homework
< Design Specification >
button 3개 사용 : run_stop 버튼, clear 버튼, mode 버튼
mode = 0 : up counting / mode = 1 : down counting
up counter : led[0] on
down counter : led[1] on
stop : led[2] on
run : led[3] on
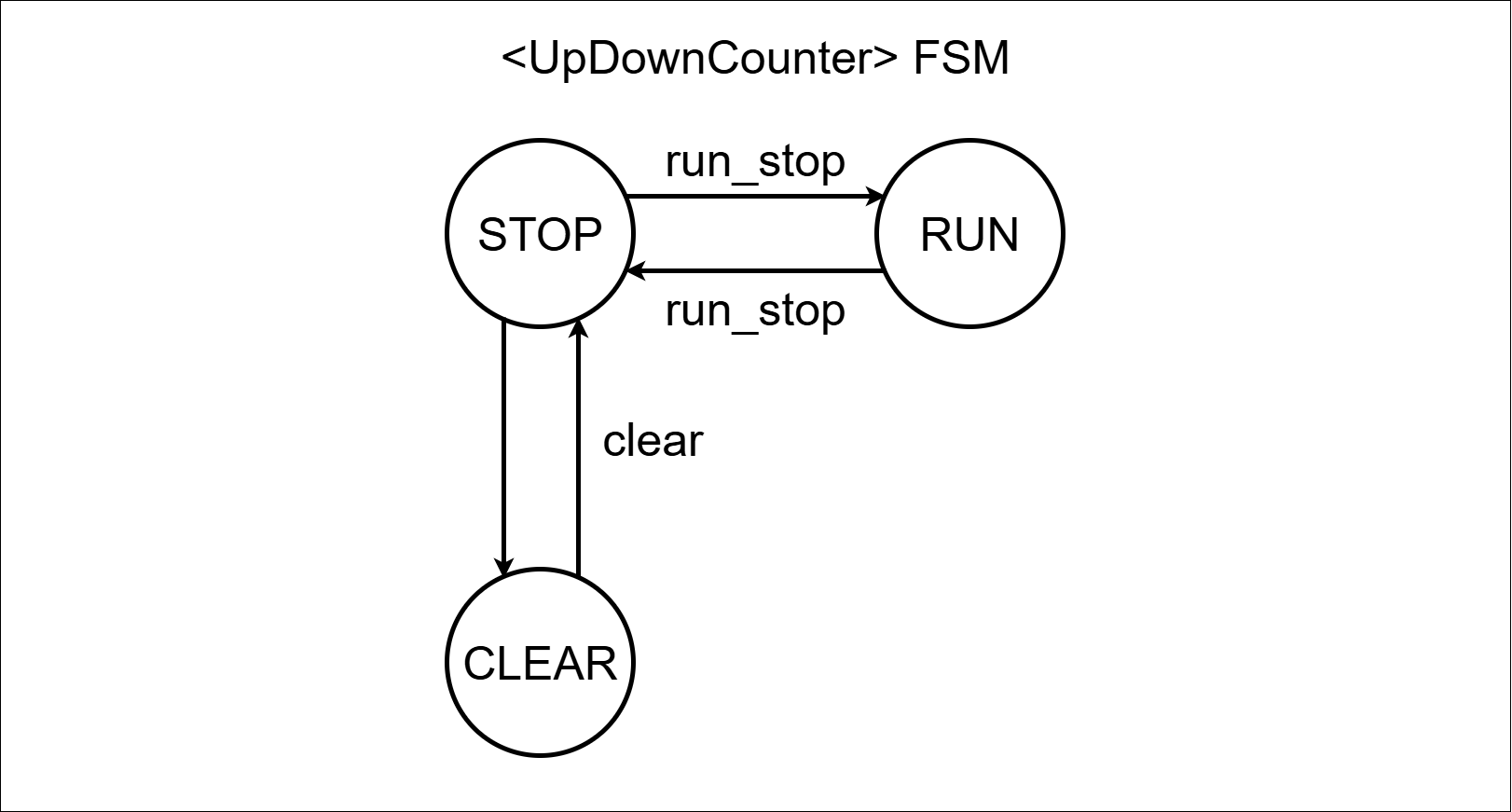
< FSM >
< Code : UpDownCounter >
//...
module up_down_counter (
input logic clk,
input logic reset,
input logic tick,
input logic mode,
input logic clear,
output logic toggle_state,
output logic [13:0] count
);
always_ff @(posedge clk or posedge reset) begin
if (reset) begin
toggle_state <= 0;
end else begin
if (mode) begin
toggle_state <= ~toggle_state;
end
end
end
always_ff @(posedge clk, posedge reset) begin
if (reset | clear) begin
count <= 0;
end else begin
if (toggle_state == 1'b0) begin // up counter
if (tick) begin
if (count == 9999) begin
count <= 0;
end else begin
count <= count + 1;
end
end
end else begin // down counter
if (tick) begin
if (count == 0) begin
count <= 9999;
end else begin
count <= count - 1;
end
end
end
end
end
endmodule
module cu (
input logic clk,
input logic reset,
input logic btn_L,
input logic btn_R,
output logic runstop,
output logic clear
);
typedef enum {
STOP,
RUN,
CLEAR
} state_e;
state_e state, next_state;
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
state <= STOP;
end else begin
state <= next_state;
end
end
always_comb begin
next_state = state;
runstop = 0;
clear = 0;
case (state)
STOP: begin
runstop = 0;
clear = 0;
if (btn_L) begin
next_state = CLEAR;
end else if (btn_R) begin
next_state = RUN;
end
end
CLEAR: begin
clear = 1;
if (btn_L) begin
next_state = STOP;
end
end
RUN: begin
runstop = 1;
if (btn_R) begin
next_state = STOP;
end
end
endcase
end
endmodule
module state_led (
input logic runstop,
input logic clear,
input logic mode,
output logic [3:0] led
); // (condition) ? true : false
assign led[1:0] = mode ? 2'b10 : 2'b01;
assign led[3:2] = runstop ? 2'b10 : 2'b01;
endmodule
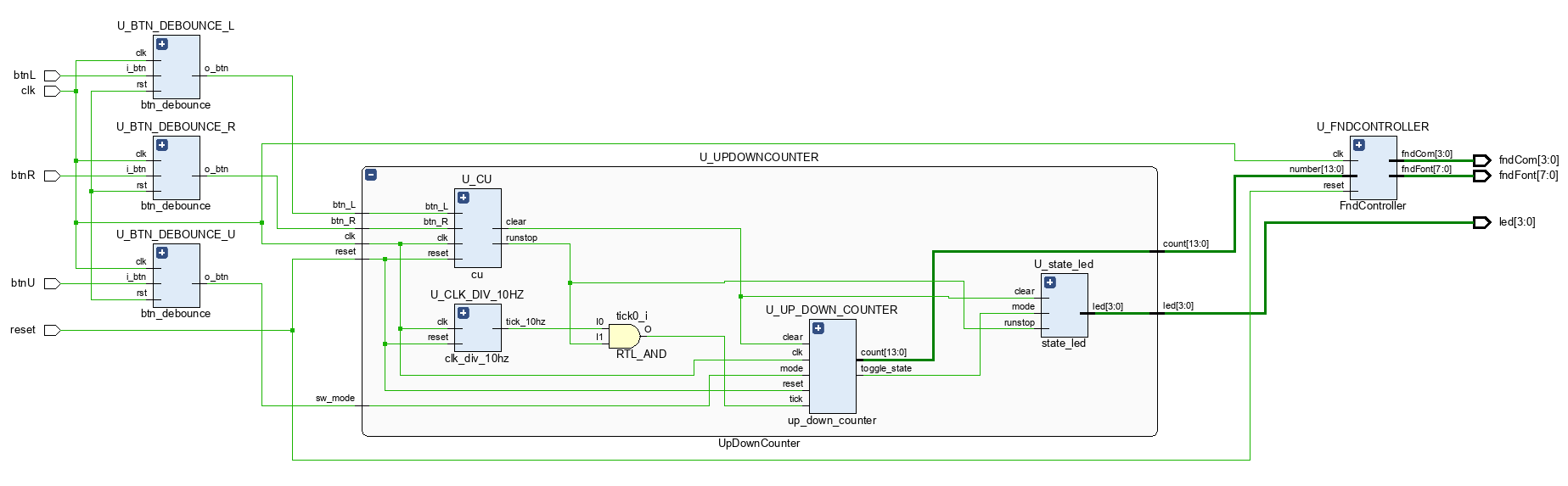
< Schematic >
< Video >
< 고찰 >
led 변수명을 led_mode, led_runstop처럼 의미를 명확히 알 수 있도록 개선해야 함
기능별로 분리하여 코드의 확장성을 확보할 필요가 있음
하나의 control_unit에서 상태를 구분하는 제어 신호들을 받아, 여러 개의 FSM을 동시에 처리하는 구조를 고려함. (mode FSM은 기존대로 유지)
< 파일 >
sources (Homework)
constrs (Homework)