
Run_Stop_Clear_Counter Design
< Code : UpDownCounter >
`timescale 1ns / 1ps
module UpDownCounter (
input logic clk,
input logic reset,
input logic btn_mode,
input logic btn_run_stop,
input logic btn_clear,
output logic [ 1:0] led_mode,
output logic [ 1:0] led_run_stop,
output logic [13:0] count
);
logic tick_10hz;
logic mode, run_stop, clear;
clk_div_10hz U_Clk_Div_10hz (
.clk (clk),
.reset (reset),
.run_stop (run_stop),
.clear (clear),
.tick_10hz(tick_10hz)
);
up_down_counter U_Up_Down_Counter (
.clk (clk),
.reset(reset),
.tick (tick_10hz),
.mode (mode),
.clear(clear),
.count(count)
);
control_unit U_Control_Unit (
.clk (clk),
.reset (reset),
.btn_mode (btn_mode),
.btn_run_stop(btn_run_stop),
.btn_clear (btn_clear),
.mode (mode),
.run_stop (run_stop),
.clear (clear),
.led_mode (led_mode),
.led_run_stop(led_run_stop)
);
endmodule
module clk_div_10hz (
input logic clk,
input logic reset,
input logic run_stop,
input logic clear,
output logic tick_10hz
);
//logic [23:0] div_counter;
logic [$clog2(10_000_000)-1:0] div_counter;
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
div_counter <= 0;
tick_10hz <= 1'b0;
end else begin
if (run_stop) begin
if (div_counter == 10_000_000 - 1) begin
div_counter <= 0;
tick_10hz <= 1'b1;
end else begin
div_counter <= div_counter + 1;
tick_10hz <= 1'b0;
end
end
if (clear) begin
div_counter <= 0;
tick_10hz <= 1'b0;
end
end
end
endmodule
module up_down_counter (
input logic clk,
input logic reset,
input logic tick,
input logic mode,
input logic clear,
output logic [13:0] count
);
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
count <= 0;
end else begin
if (clear) begin
count <= 0;
end
if (mode == 1'b0) begin // up counter
if (tick) begin
if (count == 9999) begin
count <= 0;
end else begin
count <= count + 1;
end
end
end else begin // down counter
if (tick) begin
if (count == 0) begin
count <= 9999;
end else begin
count <= count - 1;
end
end
end
end
end
endmodule
module control_unit (
input logic clk,
input logic reset,
input logic btn_mode,
input logic btn_run_stop,
input logic btn_clear,
output logic mode,
output logic run_stop,
output logic clear,
output logic [1:0] led_mode,
output logic [1:0] led_run_stop
);
/******************** MODE FSM ********************/
typedef enum {
UP,
DOWN
} state_mode_e;
state_mode_e state_mode, next_state_mode;
// state memory
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
state_mode <= UP;
end else begin
state_mode <= next_state_mode;
end
end
// transition logic
always_comb begin
next_state_mode = state_mode;
mode = 0;
led_mode = 2'b00;
case (state_mode)
UP: begin
led_mode = 2'b01;
if (btn_mode) begin
next_state_mode = DOWN;
end
end
DOWN: begin
mode = 1;
led_mode = 2'b10;
if (btn_mode) begin
next_state_mode = UP;
end
end
endcase
end
/******************** RUN STOP CLEAR FSM ********************/
typedef enum {
STOP,
RUN,
CLEAR
} state_counter_e;
state_counter_e state_counter, next_state_counter;
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
state_counter <= STOP;
end else begin
state_counter <= next_state_counter;
end
end
always_comb begin
next_state_counter = state_counter;
run_stop = 0;
clear = 0;
led_run_stop = 2'b00;
case (state_counter)
STOP: begin
led_run_stop = 2'b01;
if (btn_run_stop) next_state_counter = RUN;
else if (btn_clear) next_state_counter = CLEAR;
end
RUN: begin
run_stop = 1;
led_run_stop = 2'b10;
if (btn_run_stop) next_state_counter = STOP;
end
CLEAR: begin
clear = 1;
next_state_counter = STOP;
end
endcase
end
endmodule
< Comment >
clk_div_10hz
run_stop과 clear 신호를 받아 상태에 따라 카운터 동작을 제어한다.
up_down_counter
clear 신호를 받아 카운터 값을 즉시 초기화한다.
→ 예기치 않은 상태에서도 원하는 시점에 카운터를 안정적으로 리셋할 수 있다.
control_unit
하나의 control_unit에서 상태 구분용 제어 신호를 받아 여러 개의 FSM(mode, run/stop/clear)을 동시에 처리한다.
각 FSM에서 led_mode와 led_run_stop 출력을 직접 생성하도록 설계하여 가독성과 직관성이 향상된다.
< 파일 >
sources (Class)
constrs (Class)
Serial 통신 프로토콜
1. UART
- 비동기(Asynchronous) 통신 방식
- Baud rate(bps, bit per second) 설정 값에 따라 송수신 속도 결정
- 송·수신 양측의 속도 설정이 다르면 통신 불가
- 동기 신호가 없어 에러율이 상대적으로 높음
- 송수신 속도에 제한이 있음
- 1:1 통신만 가능 (멀티포인트 불가)
- 송·수신 측에서 내부 클럭을 생성하여 타이밍 유지
2. I²C
- 동기(Synchronous) 통신 방식
- SCL(클럭)과 SDA(데이터) 2선으로 동작
- 슬레이브 주소(Address)를 지정해 통신 → SPI보다 속도가 느림
- N:N 통신 가능 (하나의 버스에 여러 마스터·슬레이브 연결 가능)
- Chip Select 신호선 불필요 (주소로 구분)
- 송신 또는 수신 중 한 방향만 가능 (Half-duplex)
3. SPI
- 동기(Synchronous) 통신 방식
- SCLK(클럭), MOSI, MISO, CS(Chip Select) 신호 사용
- 클럭에 맞춰 매우 빠른 데이터 전송 가능 → 세 방식 중 가장 빠름
- 1:N 통신 (마스터 1개, 다수 슬레이브 가능)
- 슬레이브 선택을 위해 Chip Select 신호선 사용
- 송수신 동시 가능 (Full-duplex)
UART / I²C / SPI 비교
| 구분 | UART | I²C | SPI |
|---|---|---|---|
| 통신 방식 | 비동기 | 동기 | 동기 |
| 데이터선 | Tx, Rx | SDA, SCL | MOSI, MISO, SCLK, CS |
| 속도 | 낮음 | 중간 | 빠름 |
| 통신 구조 | 1:1 | N:N | 1:N |
| Chip Select | X | X | O |
| Duplex | Full | Half | Full |
| 장점 | 간단, 배선 적음 | 배선 적음, 다중 지원 | 빠름, 동시 송수신 |
| 단점 | 느림, 멀티 불가 | SPI보다 느림 | 배선 많음, CS 관리 필요 |
Uart (Transmitter) Design
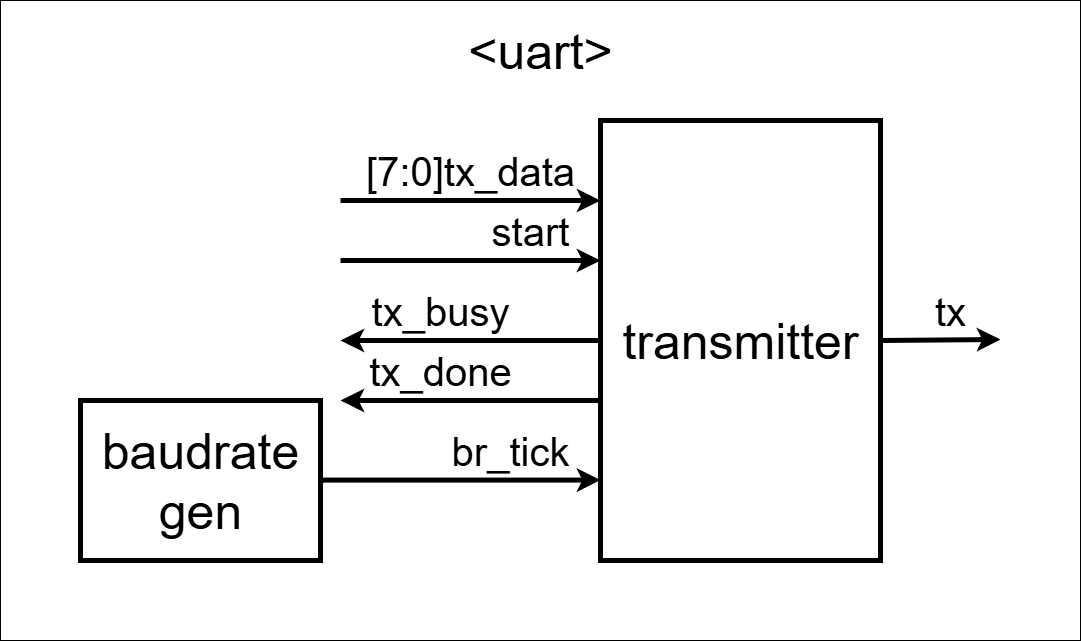
< Block Design >
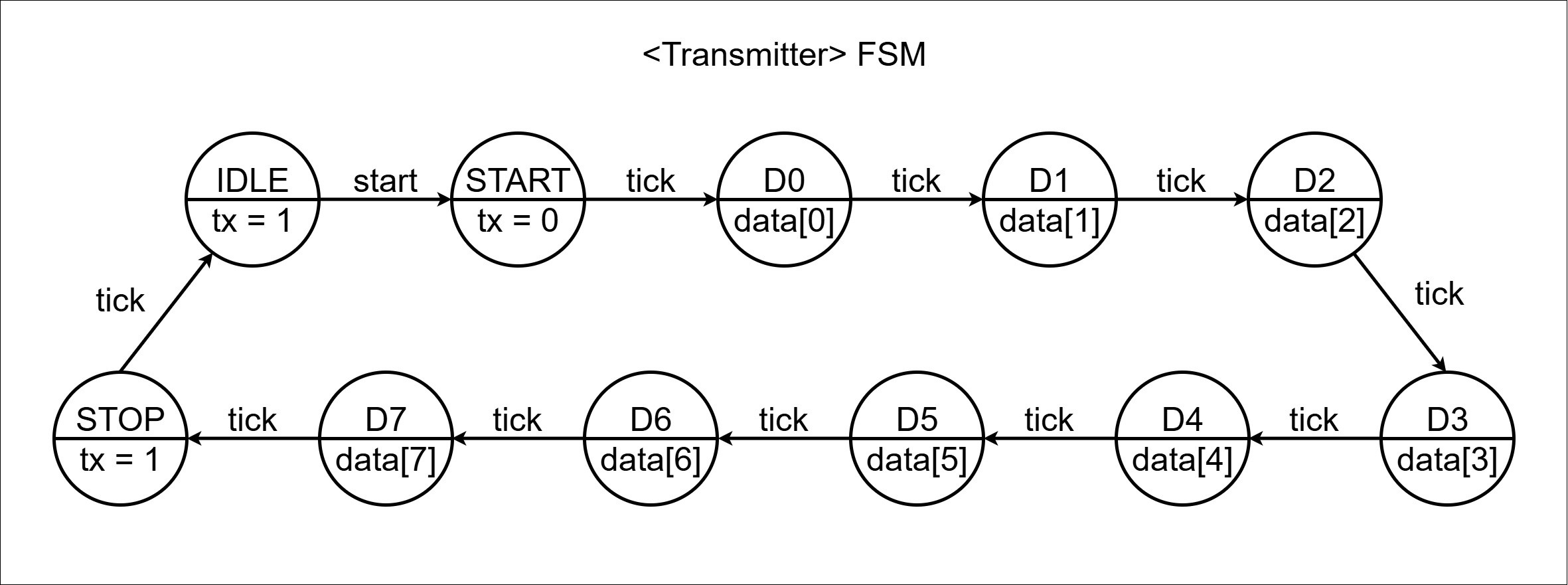
< FSM (Transmitter) >
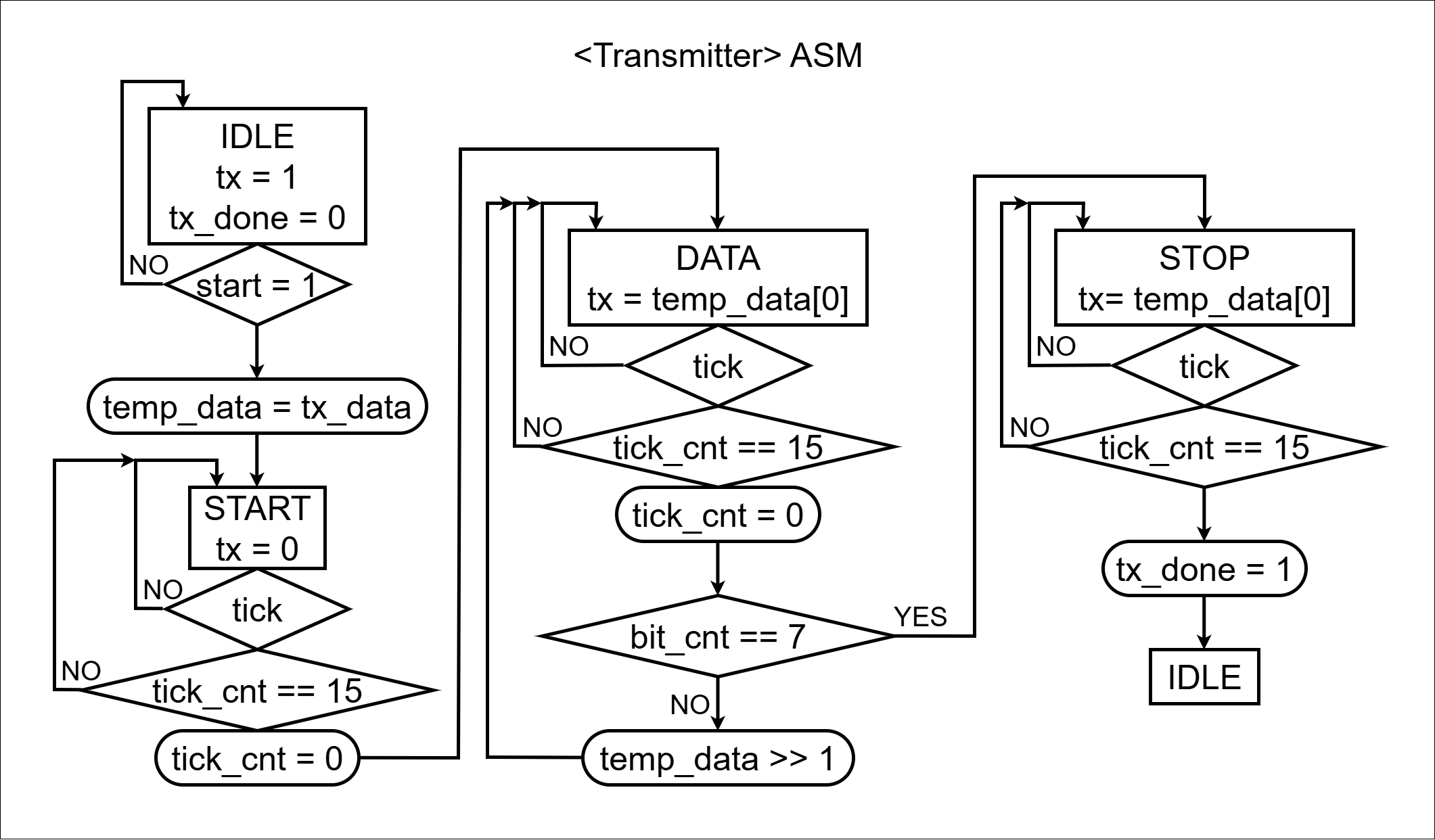
< ASM (Transmitter) >
< Code : Uart (Transmitter) >
`timescale 1ns / 1ps
module uart (
input logic clk,
input logic reset,
input logic start,
input logic [7:0] tx_data,
output logic tx,
output logic tx_busy,
output logic tx_done
);
logic br_tick;
baudrate_gen U_Baudrate_Gen (
.clk (clk),
.reset (reset),
.br_tick(br_tick)
);
transmitter U_Transmitter (
.clk (clk),
.reset (reset),
.br_tick(br_tick),
.start (start),
.tx_data(tx_data),
.tx_busy(tx_busy),
.tx_done(tx_done),
.tx (tx)
);
endmodule
module baudrate_gen (
input logic clk,
input logic reset,
output logic br_tick
);
//logic [$clog2(100_000_000/9600/16)-1:0] br_counter;
logic [3:0] br_counter;
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
br_counter <= 0;
br_tick <= 1'b0;
end else begin
//if (br_counter == 100_000_000 / 9600 / 16 - 1) begin // 9600hz 9600bps
if (br_counter == 10 - 1) begin
br_counter <= 0;
br_tick <= 1'b1;
end else begin
br_counter <= br_counter + 1;
br_tick <= 1'b0;
end
end
end
endmodule
module transmitter (
input logic clk,
input logic reset,
input logic br_tick,
input logic start,
input logic [7:0] tx_data,
output logic tx_busy,
output logic tx_done,
output logic tx
);
typedef enum {
IDLE,
START,
DATA,
STOP
} tx_state_e;
tx_state_e tx_state, tx_next_state;
logic [7:0] temp_data_next, temp_data_reg;
logic tx_reg, tx_next;
logic [3:0] tick_cnt_reg, tick_cnt_next;
logic [2:0] bit_cnt_reg, bit_cnt_next;
logic tx_done_reg, tx_done_next;
logic tx_busy_reg, tx_busy_next;
assign tx = tx_reg;
assign tx_busy = tx_busy_reg;
assign tx_done = tx_done_reg;
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
tx_state <= IDLE;
temp_data_reg <= 0;
tx_reg <= 1'b1;
tick_cnt_reg <= 0;
bit_cnt_reg <= 0;
tx_done_reg <= 0;
tx_busy_reg <= 0;
end else begin
tx_state <= tx_next_state;
temp_data_reg <= temp_data_next;
tx_reg <= tx_next;
tick_cnt_reg <= tick_cnt_next;
bit_cnt_reg <= bit_cnt_next;
tx_done_reg <= tx_done_next;
tx_busy_reg <= tx_busy_next;
end
end
always_comb begin
tx_next_state = tx_state;
temp_data_next = temp_data_reg;
tx_next = tx_reg;
tick_cnt_next = tick_cnt_reg;
bit_cnt_next = bit_cnt_reg;
tx_done_next = tx_done_reg;
tx_busy_next = tx_busy_reg;
case (tx_state)
IDLE: begin
tx_next = 1'b1;
tx_done_next = 0;
tx_busy_next = 0;
if (start) begin
tx_next_state = START;
temp_data_next = tx_data;
tick_cnt_next = 0;
bit_cnt_next = 0;
tx_busy_next = 1;
end
end
START: begin
tx_next = 1'b0;
if (br_tick) begin
if (tick_cnt_reg == 15) begin
tx_next_state = DATA;
tick_cnt_next = 0;
end else begin
tick_cnt_next = tick_cnt_reg + 1;
end
end
end
DATA: begin
tx_next = temp_data_reg[0];
if (br_tick) begin
if (tick_cnt_reg == 15) begin
tick_cnt_next = 0;
if (bit_cnt_reg == 7) begin
tx_next_state = STOP;
bit_cnt_next = 0;
end else begin
temp_data_next = {1'b0, temp_data_reg[7:1]};
bit_cnt_next = bit_cnt_reg + 1;
end
end else begin
tick_cnt_next = tick_cnt_reg + 1;
end
end
end
STOP: begin
tx_next = 1'b1;
if (br_tick) begin
if (tick_cnt_reg == 15) begin
tx_next_state = IDLE;
tx_done_next = 1;
tx_busy_next = 0;
tick_cnt_next = 0;
end else begin
tick_cnt_next = tick_cnt_reg + 1;
end
end
end
endcase
end
endmodule
< Comment >
baudrate_gen
시스템 클럭(100 MHz)에서 UART 통신 속도 9600bps, 16배 오버샘플링(표준 UART 수신 방식) 조건에 맞춰 br_tick을 생성하는 모듈이다.
카운터 최대값을 100_000_000 / 9600 / 16 - 1로 설정하여, 해당 주기마다 br_tick을 1클럭 동안 High로 만들어 transmitter와 receiver가 동일한 baudrate 클럭에 동기화되도록 한다.
transmitter
UART 송신기를 구현한 모듈로, start 신호 입력 시 데이터(tx_data)를 UART 프레임 구조(1 start bit + 8 data bits + 1 stop bit)로 직렬 전송한다.
FSM(IDLE → START → DATA → STOP)으로 동작하며, 각 비트 전송은 baudrate 오버샘플링(16배) 기준 br_tick 신호에 맞춰 진행된다.
데이터 구동 시 LSB부터 순차적으로 전송하며, 모든 비트 전송이 완료되면 tx_done을 1로 설정하고 tx_busy를 0으로 복귀시켜 다음 전송을 준비한다.
< 파일 >
sources (Class)
sim (Class)
Homework
< Design Specification >
- receiver 설계 → uart 구현
- uart + up down counter → PC 제어 (ComPortMaster)
- “r” : run 상태
- ”s” : stop 상태
- “c” : clear 상태
- “m” : mode변경
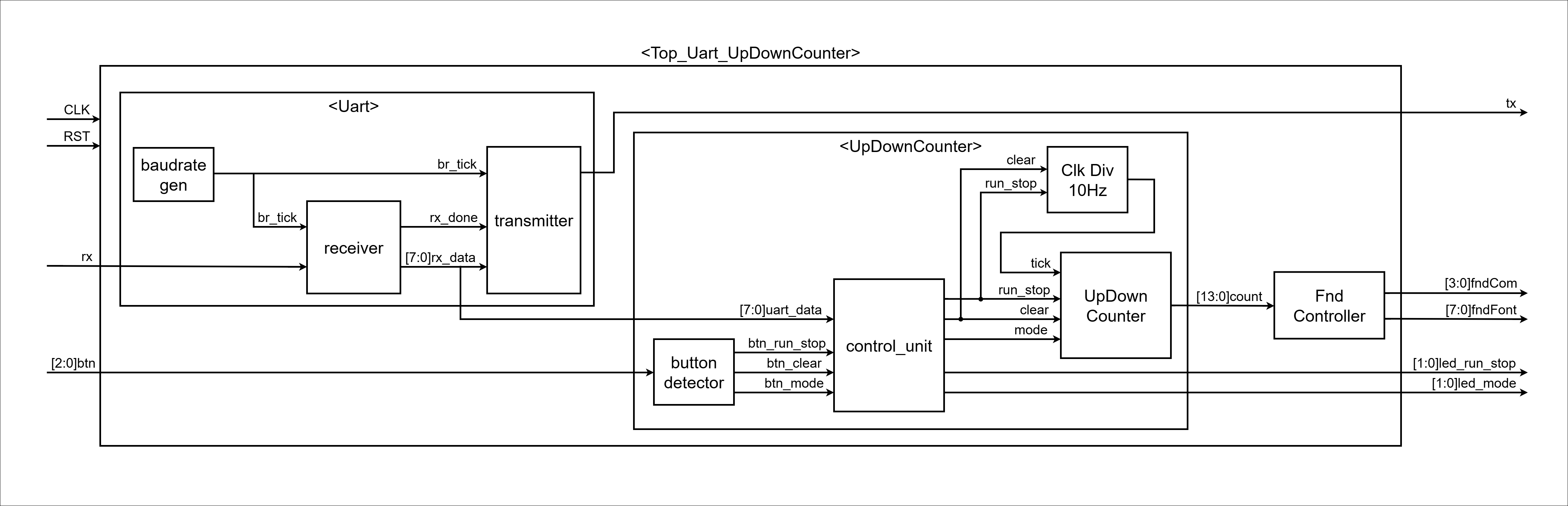
< Block Diagram >
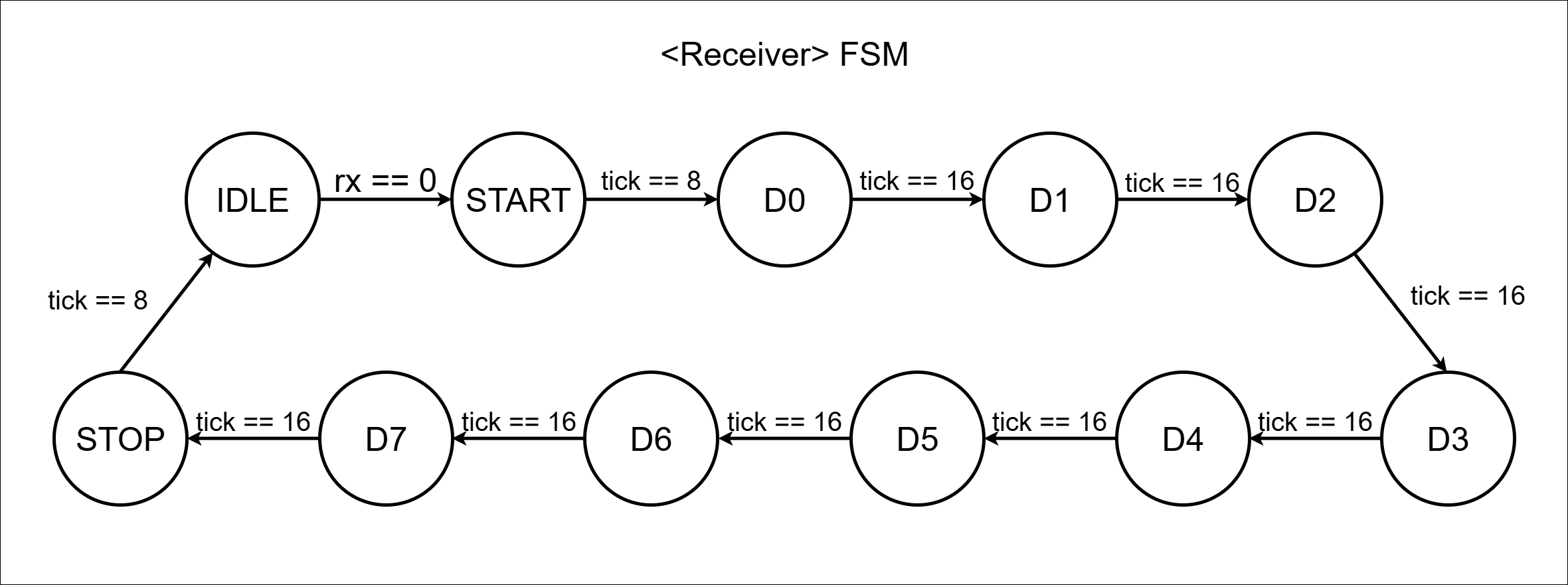
< FSM (receiver) >
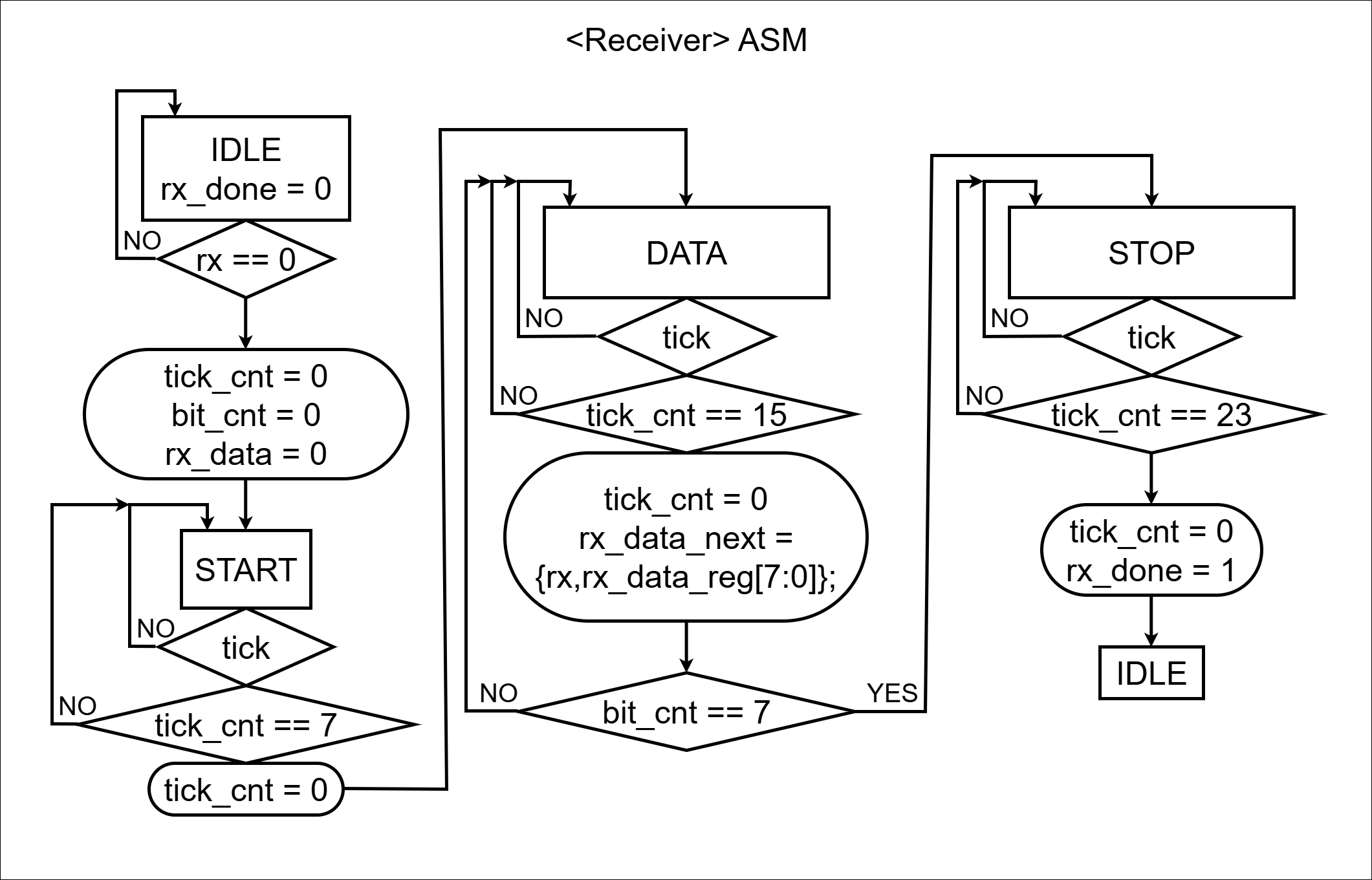
< ASM (receiver) >
< Code : uart >
`timescale 1ns / 1ps
module uart (
input logic clk,
input logic reset,
input logic rx,
output logic tx,
output logic [7:0] uart_data
);
logic br_tick;
logic rx_done;
logic [7:0] rx_data;
assign uart_data = rx_done ? rx_data : 8'b0;
baudrate_gen U_Baudrate_Gen (
.clk (clk),
.reset (reset),
.br_tick(br_tick)
);
receiver U_Receiver (
.clk (clk),
.reset (reset),
.br_tick(br_tick),
.rx (rx),
.rx_data(rx_data),
.rx_done(rx_done)
);
transmitter U_Transmitter (
.clk (clk),
.reset (reset),
.br_tick(br_tick),
.start (rx_done),
.tx_data(rx_data),
.tx_busy(),
.tx_done(),
.tx (tx)
);
endmodule
module baudrate_gen (
input logic clk,
input logic reset,
output logic br_tick
);
logic [$clog2(100_000_000/9600/16)-1:0] br_counter;
// logic [3:0] br_counter;
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
br_counter <= 0;
br_tick <= 1'b0;
end else begin
if (br_counter == 100_000_000 / 9600 / 16 - 1) begin // 9600hz 9600bps
// if (br_counter == 10 - 1) begin
br_counter <= 0;
br_tick <= 1'b1;
end else begin
br_counter <= br_counter + 1;
br_tick <= 1'b0;
end
end
end
endmodule
module receiver (
input logic clk,
input logic reset,
input logic br_tick,
input logic rx,
output logic [7:0] rx_data,
output logic rx_done
);
typedef enum {
IDLE,
START,
DATA,
STOP
} rx_state_e;
rx_state_e rx_state, rx_next_state;
logic [7:0] rx_data_reg, rx_data_next;
logic [4:0] tick_cnt_reg, tick_cnt_next;
logic [2:0] bit_cnt_reg, bit_cnt_next;
logic rx_done_reg, rx_done_next;
assign rx_done = rx_done_reg;
assign rx_data = rx_data_reg;
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
rx_state <= IDLE;
rx_data_reg <= 0;
tick_cnt_reg <= 0;
bit_cnt_reg <= 0;
rx_done_reg <= 0;
end else begin
rx_state <= rx_next_state;
rx_data_reg <= rx_data_next;
tick_cnt_reg <= tick_cnt_next;
bit_cnt_reg <= bit_cnt_next;
rx_done_reg <= rx_done_next;
end
end
always_comb begin
rx_next_state = rx_state;
rx_data_next = rx_data_reg;
tick_cnt_next = tick_cnt_reg;
bit_cnt_next = bit_cnt_reg;
rx_done_next = rx_done_reg;
case (rx_state)
IDLE: begin
rx_done_next = 0;
if (rx == 0) begin
rx_next_state = START;
rx_data_next = 0;
tick_cnt_next = 0;
bit_cnt_next = 0;
end
end
START: begin
if (br_tick) begin
if (tick_cnt_reg == 7) begin
rx_next_state = DATA;
tick_cnt_next = 0;
end else begin
tick_cnt_next = tick_cnt_reg + 1;
end
end
end
DATA: begin
if (br_tick) begin
if (tick_cnt_reg == 15) begin
tick_cnt_next = 0;
rx_data_next = {rx, rx_data_reg[7:1]};
if (bit_cnt_reg == 7) begin
rx_next_state = STOP;
bit_cnt_next = 0;
end else begin
bit_cnt_next = bit_cnt_reg + 1;
end
end else begin
tick_cnt_next = tick_cnt_reg + 1;
end
end
end
STOP: begin
if (br_tick) begin
if (tick_cnt_reg == 23) begin
rx_next_state = IDLE;
rx_done_next = 1;
tick_cnt_next = 0;
end else begin
tick_cnt_next = tick_cnt_reg + 1;
end
end
end
endcase
end
endmodule
module transmitter (
input logic clk,
input logic reset,
input logic br_tick,
input logic start,
input logic [7:0] tx_data,
output logic tx_busy,
output logic tx_done,
output logic tx
);
typedef enum {
IDLE,
START,
DATA,
STOP
} tx_state_e;
tx_state_e tx_state, tx_next_state;
logic [7:0] temp_data_next, temp_data_reg;
logic tx_reg, tx_next;
logic [3:0] tick_cnt_reg, tick_cnt_next;
logic [2:0] bit_cnt_reg, bit_cnt_next;
logic tx_done_reg, tx_done_next;
logic tx_busy_reg, tx_busy_next;
assign tx = tx_reg;
assign tx_busy = tx_busy_reg;
assign tx_done = tx_done_reg;
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
tx_state <= IDLE;
temp_data_reg <= 0;
tx_reg <= 1'b1;
tick_cnt_reg <= 0;
bit_cnt_reg <= 0;
tx_done_reg <= 0;
tx_busy_reg <= 0;
end else begin
tx_state <= tx_next_state;
temp_data_reg <= temp_data_next;
tx_reg <= tx_next;
tick_cnt_reg <= tick_cnt_next;
bit_cnt_reg <= bit_cnt_next;
tx_done_reg <= tx_done_next;
tx_busy_reg <= tx_busy_next;
end
end
always_comb begin
tx_next_state = tx_state;
temp_data_next = temp_data_reg;
tx_next = tx_reg;
tick_cnt_next = tick_cnt_reg;
bit_cnt_next = bit_cnt_reg;
tx_done_next = tx_done_reg;
tx_busy_next = tx_busy_reg;
case (tx_state)
IDLE: begin
tx_next = 1'b1;
tx_done_next = 0;
tx_busy_next = 0;
if (start) begin
tx_next_state = START;
temp_data_next = tx_data;
tick_cnt_next = 0;
bit_cnt_next = 0;
tx_busy_next = 1;
end
end
START: begin
tx_next = 1'b0;
if (br_tick) begin
if (tick_cnt_reg == 15) begin
tx_next_state = DATA;
tick_cnt_next = 0;
end else begin
tick_cnt_next = tick_cnt_reg + 1;
end
end
end
DATA: begin
tx_next = temp_data_reg[0];
if (br_tick) begin
if (tick_cnt_reg == 15) begin
tick_cnt_next = 0;
if (bit_cnt_reg == 7) begin
tx_next_state = STOP;
bit_cnt_next = 0;
end else begin
temp_data_next = {1'b0, temp_data_reg[7:1]};
bit_cnt_next = bit_cnt_reg + 1;
end
end else begin
tick_cnt_next = tick_cnt_reg + 1;
end
end
end
STOP: begin
tx_next = 1'b1;
if (br_tick) begin
if (tick_cnt_reg == 15) begin
tx_next_state = IDLE;
tx_done_next = 1;
tx_busy_next = 0;
tick_cnt_next = 0;
end else begin
tick_cnt_next = tick_cnt_reg + 1;
end
end
end
endcase
end
endmodule
< Comment >
uart
Baudrate Generator: 시스템 클럭(예: 100 MHz)에서 UART 속도(9600 bps, 16배 오버샘플링)에 맞춘 br_tick 생성. 송·수신 모듈 모두 이 신호로 타이밍 동기화.
Receiver: rx 입력을 샘플링해 8비트 데이터(rx_data) 복원, 수신 완료 시 rx_done=1 출력.
Transmitter: rx_done 신호를 start로 받아, 수신한 데이터를 그대로 직렬 송신(tx).
uart_data: rx_done 시점에만 유효 데이터를 출력, 그 외에는 0 유지. 전체적으로 수신한 데이터를 즉시 재전송(Echo)하는 구조이며, 모든 시퀀스는 br_tick 기반으로 송·수신 동기를 유지한다.
receiver
UART 수신기. rx의 start-bit(낙하) 감지 후 16배 오버샘플링 기준 br_tick에 맞춰 비트 중앙에서 샘플링한다.
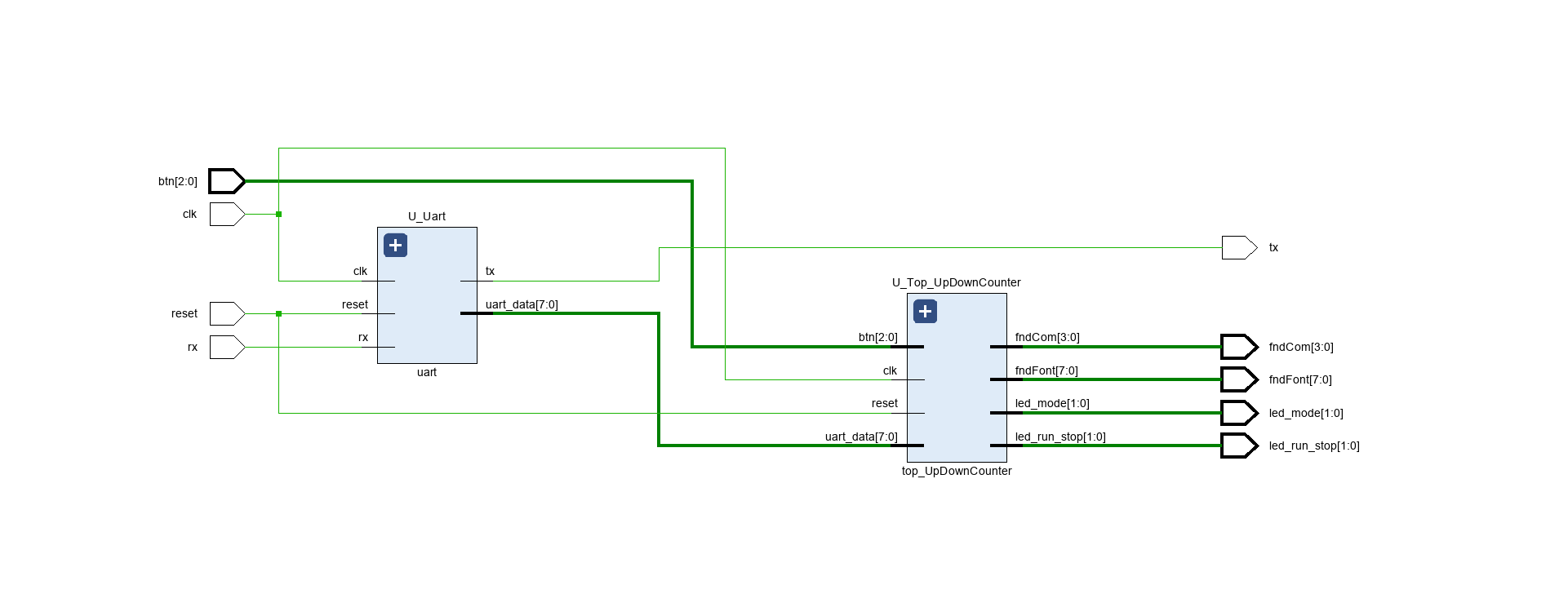
< Code : top_Uart_UpDownCounter >
`timescale 1ns / 1ps
module top_Uart_UpDownCounter (
input logic clk,
input logic reset,
input logic [2:0] btn,
input logic rx,
output logic tx,
output logic [1:0] led_mode,
output logic [1:0] led_run_stop,
output logic [3:0] fndCom,
output logic [7:0] fndFont
);
logic [7:0] uart_data;
uart U_Uart (
.clk (clk),
.reset (reset),
.rx (rx),
.tx (tx),
.uart_data(uart_data)
);
top_UpDownCounter U_Top_UpDownCounter (
.clk (clk),
.reset (reset),
.btn (btn),
.uart_data (uart_data),
.led_mode (led_mode),
.led_run_stop(led_run_stop),
.fndCom (fndCom),
.fndFont (fndFont)
);
endmodule
< Code : UpDownCounter (control_unit) >
// ...
module control_unit (
input logic clk,
input logic reset,
input logic btn_mode,
input logic btn_run_stop,
input logic btn_clear,
input logic [7:0] uart_data,
output logic mode,
output logic run_stop,
output logic clear,
output logic [1:0] led_mode,
output logic [1:0] led_run_stop
);
/******************** MODE FSM ********************/
typedef enum {
UP,
DOWN
} state_mode_e;
state_mode_e state_mode, next_state_mode;
// state memory
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
state_mode <= UP;
end else begin
state_mode <= next_state_mode;
end
end
// transition logic
always_comb begin
next_state_mode = state_mode;
mode = 0;
led_mode = 2'b00;
case (state_mode)
UP: begin
led_mode = 2'b01;
if (btn_mode || (uart_data == "m")) begin
next_state_mode = DOWN;
end
end
DOWN: begin
mode = 1;
led_mode = 2'b10;
if (btn_mode || (uart_data == "m")) begin
next_state_mode = UP;
end
end
endcase
end
/******************** RUN STOP CLEAR FSM ********************/
typedef enum {
STOP,
RUN,
CLEAR
} state_counter_e;
state_counter_e state_counter, next_state_counter;
always_ff @(posedge clk, posedge reset) begin
if (reset) begin
state_counter <= STOP;
end else begin
state_counter <= next_state_counter;
end
end
always_comb begin
next_state_counter = state_counter;
run_stop = 0;
clear = 0;
led_run_stop = 2'b00;
case (state_counter)
STOP: begin
led_run_stop = 2'b01;
if (btn_run_stop || (uart_data == "r"))
next_state_counter = RUN;
else if (btn_clear || (uart_data == "c"))
next_state_counter = CLEAR;
end
RUN: begin
run_stop = 1;
led_run_stop = 2'b10;
if (btn_run_stop || (uart_data == "s"))
next_state_counter = STOP;
end
CLEAR: begin
clear = 1;
next_state_counter = STOP;
end
endcase
end
endmodule
< Schematic >
< Video >
< 고찰 >
control_unit에서 UART 데이터를 입력받아 상태 변경 사항을 업데이트하도록 설계 → 확장성 확보
< 파일 >
sources (Homework)
constrs (Homework)